

A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
5.7. Summary 97<br />
A<br />
D<br />
E<br />
e<br />
e<br />
B<br />
C<br />
F<br />
e<br />
G<br />
(a)<br />
J<br />
H<br />
e<br />
K<br />
source constellation<br />
(initial state)<br />
Root<br />
A C<br />
D F<br />
H<br />
Root(A(D)|C(F|H))<br />
Root<br />
event e B<br />
C<br />
(b)<br />
target consteallation<br />
(after occurrence of e)<br />
G J<br />
K<br />
Root(B|C(G|J(K)))<br />
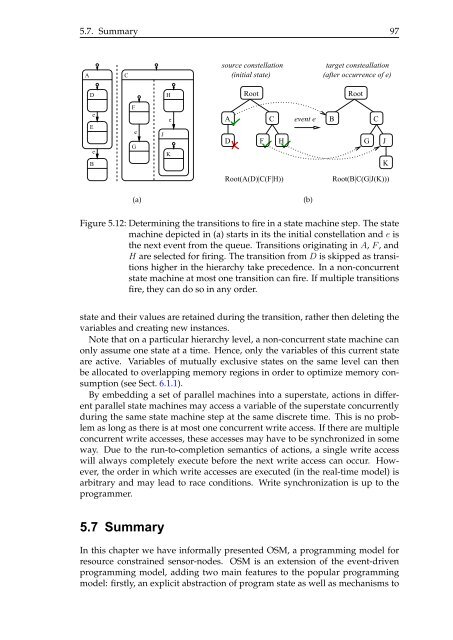
Figure 5.12: Determining the transitions to fire in a state machine step. The state<br />
machine depicted in (a) starts in its the initial constellation and e is<br />
the next event from the queue. Transitions originating in A, F , and<br />
H are selected <strong>for</strong> firing. The transition from D is skipped as transitions<br />
higher in the hierarchy take precedence. In a non-concurrent<br />
state machine at most one transition can fire. If multiple transitions<br />
fire, they can do so in any order.<br />
state and their values are retained during the transition, rather then deleting the<br />
variables and creating new instances.<br />
Note that on a particular hierarchy level, a non-concurrent state machine can<br />
only assume one state at a time. Hence, only the variables of this current state<br />
are active. Variables of mutually exclusive states on the same level can then<br />
be allocated to overlapping memory regions in order to optimize memory consumption<br />
(see Sect. 6.1.1).<br />
By embedding a set of parallel machines into a superstate, actions in different<br />
parallel state machines may access a variable of the superstate concurrently<br />
during the same state machine step at the same discrete time. This is no problem<br />
as long as there is at most one concurrent write access. If there are multiple<br />
concurrent write accesses, these accesses may have to be synchronized in some<br />
way. Due to the run-to-completion semantics of actions, a single write access<br />
will always completely execute be<strong>for</strong>e the next write access can occur. However,<br />
the order in which write accesses are executed (in the real-time model) is<br />
arbitrary and may lead to race conditions. Write synchronization is up to the<br />
programmer.<br />
5.7 Summary<br />
In this chapter we have in<strong>for</strong>mally presented OSM, a programming model <strong>for</strong><br />
resource constrained sensor-nodes. OSM is an extension of the event-driven<br />
programming model, adding two main features to the popular programming<br />
model: firstly, an explicit abstraction of program state as well as mechanisms to













