

A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
72 Chapter 4. Event-driven <strong>Programming</strong> in Practice<br />
Choosing the next phase: Branching<br />
Often there are several potential next phases in sensor-network programs. The<br />
choice of the actual next phase then depends on an input event, the state of a<br />
previous computation, or a combination of both. Also, a single phase may be<br />
reachable through multiple paths, as in the following example.<br />
Start<br />
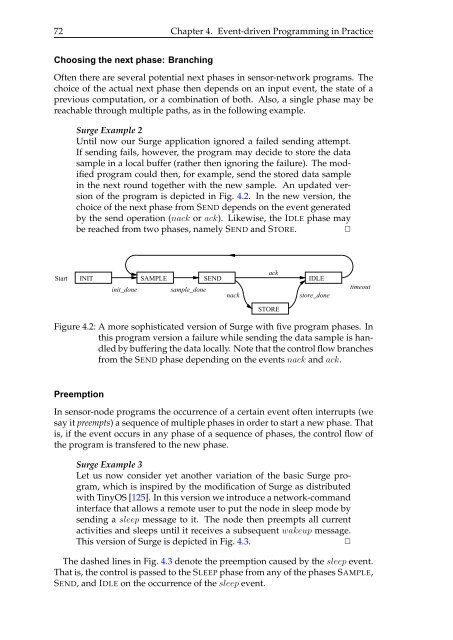
Surge Example 2<br />
Until now our Surge application ignored a failed sending attempt.<br />
If sending fails, however, the program may decide to store the data<br />
sample in a local buffer (rather then ignoring the failure). The modified<br />
program could then, <strong>for</strong> example, send the stored data sample<br />
in the next round together with the new sample. An updated version<br />
of the program is depicted in Fig. 4.2. In the new version, the<br />
choice of the next phase from SEND depends on the event generated<br />
by the send operation (nack or ack). Likewise, the IDLE phase may<br />
be reached from two phases, namely SEND and STORE. ✷<br />
INIT SAMPLE<br />
init_done sample_done<br />
SEND<br />
nack<br />
ack<br />
STORE<br />
IDLE<br />
store_done<br />
timeout<br />
Figure 4.2: A more sophisticated version of Surge with five program phases. In<br />
this program version a failure while sending the data sample is handled<br />
by buffering the data locally. Note that the control flow branches<br />
from the SEND phase depending on the events nack and ack.<br />
Preemption<br />
In sensor-node programs the occurrence of a certain event often interrupts (we<br />
say it preempts) a sequence of multiple phases in order to start a new phase. That<br />
is, if the event occurs in any phase of a sequence of phases, the control flow of<br />
the program is transfered to the new phase.<br />
Surge Example 3<br />
Let us now consider yet another variation of the basic Surge program,<br />
which is inspired by the modification of Surge as distributed<br />
with TinyOS [125]. In this version we introduce a network-command<br />
interface that allows a remote user to put the node in sleep mode by<br />
sending a sleep message to it. The node then preempts all current<br />
activities and sleeps until it receives a subsequent wakeup message.<br />
This version of Surge is depicted in Fig. 4.3. ✷<br />
The dashed lines in Fig. 4.3 denote the preemption caused by the sleep event.<br />
That is, the control is passed to the SLEEP phase from any of the phases SAMPLE,<br />
SEND, and IDLE on the occurrence of the sleep event.













