

A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
7.3. Memory-Efficient Programs 133<br />
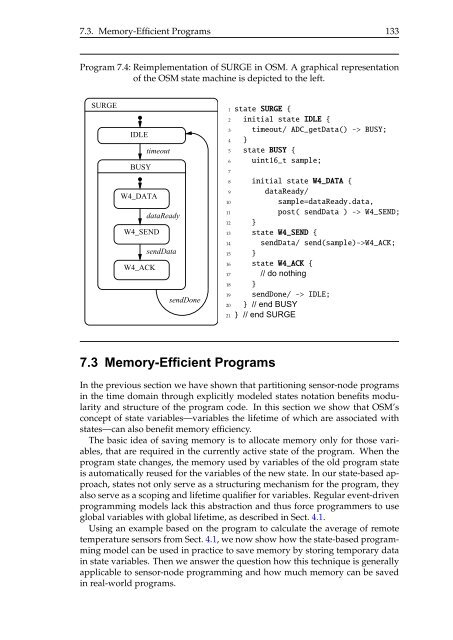
Program 7.4: Reimplementation of SURGE in OSM. A graphical representation<br />
of the OSM state machine is depicted to the left.<br />
SURGE<br />
IDLE<br />
BUSY<br />
W4_DATA<br />
W4_SEND<br />
W4_ACK<br />
timeout<br />
dataReady<br />
sendData<br />
sendDone<br />
1 state SURGE {<br />
7.3 Memory-Efficient Programs<br />
2 initial state IDLE {<br />
3 timeout/ ADC_getData() -> BUSY;<br />
4 }<br />
5 state BUSY {<br />
6 uint16_t sample;<br />
7<br />
8 initial state W4_DATA {<br />
9 dataReady/<br />
10 sample=dataReady.data,<br />
11 post( sendData ) -> W4_SEND;<br />
12 }<br />
13 state W4_SEND {<br />
14 sendData/ send(sample)->W4_ACK;<br />
15 }<br />
16 state W4_ACK {<br />
17 // do nothing<br />
18 }<br />
19 sendDone/ -> IDLE;<br />
20 } // end BUSY<br />
21 } // end SURGE<br />
In the previous section we have shown that partitioning sensor-node programs<br />
in the time domain through explicitly modeled states notation benefits modularity<br />
and structure of the program code. In this section we show that OSM’s<br />
concept of state variables—variables the lifetime of which are associated with<br />
states—can also benefit memory efficiency.<br />
The basic idea of saving memory is to allocate memory only <strong>for</strong> those variables,<br />
that are required in the currently active state of the program. When the<br />
program state changes, the memory used by variables of the old program state<br />
is automatically reused <strong>for</strong> the variables of the new state. In our state-based approach,<br />
states not only serve as a structuring mechanism <strong>for</strong> the program, they<br />
also serve as a scoping and lifetime qualifier <strong>for</strong> variables. Regular event-driven<br />
programming models lack this abstraction and thus <strong>for</strong>ce programmers to use<br />
global variables with global lifetime, as described in Sect. 4.1.<br />
Using an example based on the program to calculate the average of remote<br />
temperature sensors from Sect. 4.1, we now show how the state-based programming<br />
model can be used in practice to save memory by storing temporary data<br />
in state variables. Then we answer the question how this technique is generally<br />
applicable to sensor-node programming and how much memory can be saved<br />
in real-world programs.













