Click here to view as PDF - MICROmanufacturing
Click here to view as PDF - MICROmanufacturing
Click here to view as PDF - MICROmanufacturing

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Miniature Movers<br />
When handling small parts, robots can provide flexibility, repeatability, speed<br />
The job shop sign says: “You want quick,<br />
cheap and <strong>to</strong>p quality? Pick two.” Said less<br />
bluntly, every manufacturing operation involves<br />
compromises.<br />
The handling and <strong>as</strong>sembly of small parts is<br />
no exception. The most b<strong>as</strong>ic approach, moving<br />
the parts manually with human fingers and<br />
tweezers, requires minimal capital investment<br />
but produces slow and inconsistent results. Au<strong>to</strong>mating<br />
a process incre<strong>as</strong>es speed and consistency,<br />
but it also requires planning, choice and<br />
investment.<br />
Choosing an au<strong>to</strong>mation method requires<br />
juggling the elements of the manufacturing<br />
speed-cost-quality equation. One approach <strong>to</strong><br />
au<strong>to</strong>mation is cus<strong>to</strong>m designing and building a<br />
material handling system specific <strong>to</strong> the process<br />
at hand. These so-called “hard” au<strong>to</strong>mation arrangements<br />
can be engineered and fine-tuned <strong>to</strong><br />
maximize efficiency. However, if the parts being<br />
handled change, or the process is updated, the<br />
dedicated <strong>to</strong>oling must be replaced.<br />
According <strong>to</strong> Jay Hallberg, regional sales manager<br />
for Epson Robots, Carson, Calif., robotic<br />
technologies can be a productive alternative. If<br />
t<strong>here</strong> is no variety and no expected engineering<br />
changes, hard au<strong>to</strong>mation is fine, he said. “But<br />
what you are doing is spending a lot of money<br />
for hard <strong>to</strong>oling. And if anything changes, so<br />
does a lot of <strong>to</strong>oling.”<br />
A robotic au<strong>to</strong>mation system, however, can<br />
facilitate changes. “You are buying flexibility,”<br />
he said. “With a robot, it could be a matter of a<br />
5-minute program change and it’s done.” And<br />
if a process is eliminated entirely, software and<br />
ancillary <strong>to</strong>oling changes can enable the robots<br />
<strong>to</strong> be redeployed.<br />
According <strong>to</strong> Mike Cicco, direc<strong>to</strong>r of material<br />
handling for Fanuc Robotics America Inc.,<br />
Rochester Hills, Mich., a robot is a flexible <strong>to</strong>ol.<br />
The robot comes with a programmable controller.<br />
After the program is written, the end user or<br />
a robotic-systems integra<strong>to</strong>r can develop end-ofarm-<strong>to</strong>oling<br />
<strong>to</strong> grip the item <strong>to</strong> be moved, and<br />
write a cus<strong>to</strong>m code <strong>to</strong> make the robot move<br />
<strong>as</strong> desired.<br />
Robot-programming software is generally<br />
proprietary <strong>to</strong> the robot maker, but actual programming<br />
methods are standard.<br />
By Bill Kennedy, Contributing Edi<strong>to</strong>r<br />
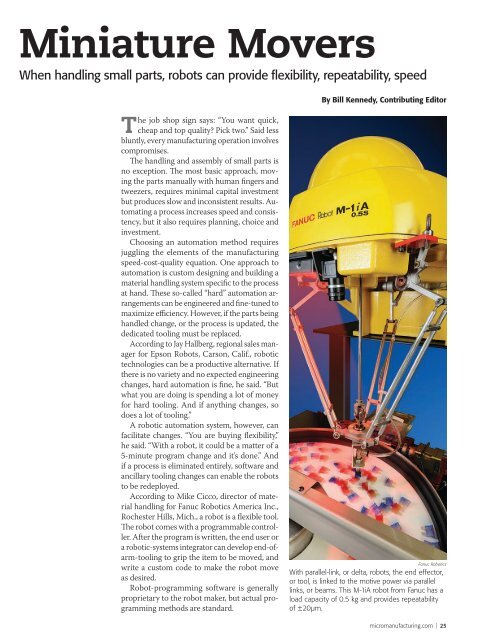
Fanuc Robotics<br />
With parallel-link, or delta, robots, the end effec<strong>to</strong>r,<br />
or <strong>to</strong>ol, is linked <strong>to</strong> the motive power via parallel<br />
links, or beams. This M-1iA robot from Fanuc h<strong>as</strong> a<br />
load capacity of 0.5 kg and provides repeatability<br />
of ±20µm.<br />
micromanufacturing.com | 25