Click here to view as PDF - MICROmanufacturing
Click here to view as PDF - MICROmanufacturing
Click here to view as PDF - MICROmanufacturing

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
pharmaceutical production and food processing.<br />
Fanuc’s Cicco said the first step in a typical micromanufacturing<br />
application of a parallel robot like the company’s<br />
M-1iA might involve using machine vision <strong>to</strong> find and identify<br />
tiny electrical components, such <strong>as</strong> resis<strong>to</strong>rs, capaci<strong>to</strong>rs and<br />
chips in s<strong>to</strong>rage bins. Then the robot would move the parts <strong>to</strong><br />
appropriate locations on a circuit board, orient them correctly<br />
and, finally, insert their submillimeter-diameter connecting<br />
wires in<strong>to</strong> the board. Cicco said the parallel robot’s approximately<br />
10"-dia. work envelope, 500-g payload capacity, ±20<br />
μm repeatability and 0.3 seconds for the 1"-12"-1" standard<br />
pick-and-place cycle make it suitable for high-speed <strong>as</strong>sembly<br />
of very small parts.<br />
Articulated robots: This style of robot resembles a human<br />
arm and is frequently used in painting, welding and material<br />
handling. The robot arm h<strong>as</strong> at le<strong>as</strong>t three rotary links and<br />
often rotates on a b<strong>as</strong>e. They are the most flexible robots, but<br />
are generally somewhat slower than application-specific robots.<br />
Cicco said an articulated robot can provide the same repeatability<br />
<strong>as</strong> a parallel robot, carry a larger payload and offers<br />
a larger work envelope. The difference is slightly lower speed;<br />
Fanuc’s LR Mate 200iC robot can cover a 24"-dia. radius around<br />
its b<strong>as</strong>e and handle a 5-kg load, while it performs the 1"-12"-1"<br />
test cycle in 0.7 seconds.<br />
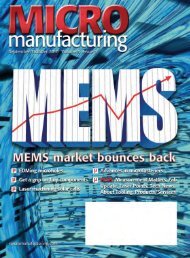
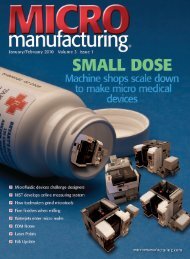
Epson Robots<br />
SCARA robots, like the G-1 from Epson (shown at left), have two<br />
parallel rotary joints that determine X and Y positioning, <strong>as</strong> well<br />
<strong>as</strong> a sliding shaft at the end of the arm that moves in the Z-axis.<br />
Cartesian robots, like the Epson 4-axis EZ Modules system shown<br />
at right, are comprised of linear slides that determine X, Y and Z<br />
movements and operate inside a rectilinear workspace.<br />
Comparing the two technologies, a company making millions<br />
of circuit boards might <strong>as</strong>semble them with a bank of<br />
parallel robots, while a smaller manufacturer could use a single<br />
articulated robot <strong>to</strong> <strong>as</strong>semble smaller numbers of an entire<br />
electronic device, such <strong>as</strong> a calcula<strong>to</strong>r. Working at a somewhat<br />
slower speed than a parallel robot, an LR Mate could <strong>as</strong>semble<br />
the circuit board, pick it up, place it in the housing, drive some<br />
screws, put down glue and <strong>as</strong>semble the whole calcula<strong>to</strong>r by<br />
itself, according <strong>to</strong> Cicco.<br />
SCARA robots: These robots have two parallel rotary joints—<br />
one at the column and one on the arm—that determine X and<br />
Y positioning, <strong>as</strong> well <strong>as</strong> a sliding shaft at the end of the arm<br />
that moves in the Z-axis. If the Z-axis rotates, it provides a 4th<br />
(or theta) axis of movement. SCARA robots are compact, f<strong>as</strong>t<br />
and accurate, with somewhat less flexibility than articulatedarm<br />
robots, but cost less. The robot design provides rigidity in<br />
the Z-axis and some compliance in the X and Y axes, making<br />
them good candidates for certain <strong>as</strong>sembly applications. The<br />
two-link arm creates a cylinder-shaped work envelope and enables<br />
the robot <strong>to</strong> reach in<strong>to</strong> an area, giving it the capability <strong>to</strong><br />
move parts in<strong>to</strong> or out of a machine or container and work in<br />
confined spaces. SCARA robots generally have a smaller footprint<br />
than other robot styles.<br />
Hallberg outlined a typical micromanufacturing application<br />
w<strong>here</strong> an Epson G3 SCARA robot w<strong>as</strong> guided with a vision system<br />
<strong>to</strong> find and pick up 0.100"-dia., 0.130"-long medical device<br />
components that were arrayed at random on an indexing conveyor.<br />
The parts featured a small ID projection, which had <strong>to</strong> be<br />
oriented for <strong>as</strong>sembly. The robot p<strong>as</strong>sed the part over a second<br />
video camera <strong>to</strong> find the projection and used that information<br />
<strong>to</strong> rotate the part radially <strong>to</strong> fit the device. It w<strong>as</strong> a “very small<br />
part with very little clearance,” Hallberg said.<br />
Cartesian robots: These systems are comprised of linear slides<br />
that determine X, Y and Z movements and create a rectilinear<br />
workspace. They may be called gantry robots when the horizontal<br />
slide is supported on both ends and can handle comparatively<br />
larger loads than SCARA robots. Cartesian robots are<br />
accurate and used in <strong>as</strong>sembly, pick-and-place and dispensing<br />
operations. A typical dispensing situation, Hallberg said, w<strong>as</strong><br />
a DNA-testing process w<strong>here</strong> the robot put micro droplets<br />
of fluid in<strong>to</strong> 0.25"-dia. test tubes. The test tubes were presented<br />
<strong>to</strong> the robot on pallets in groups of 600. Because the<br />
application didn’t require movement of parts from one area<br />
<strong>to</strong> another, the Cartesian robot’s rectilinear work area, speed<br />
and accuracy made it the best choice.<br />
Robotic integra<strong>to</strong>r RobotWorx, Men<strong>to</strong>r, Ohio, says that<br />
among the important fac<strong>to</strong>rs <strong>to</strong> consider when selecting a robot<br />
are the unit’s number of axes, working envelope, carrying capacity,<br />
speed and repeatability.<br />
Epson’s Hallberg said that the single-digit repeatability of<br />
micro<strong>as</strong>sembly robots, coupled with the precision of machine<br />
vision systems, make mechanical issues—such <strong>as</strong> the dexterity<br />
of the grippers used <strong>to</strong> pick parts—the only fac<strong>to</strong>rs limiting<br />
how small a part a robot can handle. Consequently, the combination<br />
of small size, proprietary shapes and varying levels of<br />
complexity can make au<strong>to</strong>mating micromanufacturing and <strong>as</strong>sembly<br />
with robots a creative effort.<br />
Hallberg said, “When you get in<strong>to</strong> micro, t<strong>here</strong> isn’t a lot of<br />
off-the-shelf material available. When things get really, really<br />
small, it’s really application-dependent.” He said it is probably<br />
best <strong>to</strong> work with a supplier that focuses on the <strong>as</strong>sembly and<br />
handling of microparts. µ<br />
About the author: Bill Kennedy is a<br />
contributing edi<strong>to</strong>r for <strong>MICROmanufacturing</strong><br />
and Cutting Tool Engineering magazines.<br />
Telephone: (724) 537-6182.<br />
E-mail: billk@jwr.com.<br />
micromanufacturing.com | 29