

KR C4 compact - KUKA Robotics
KR C4 compact - KUKA Robotics
KR C4 compact - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3 Safety<br />
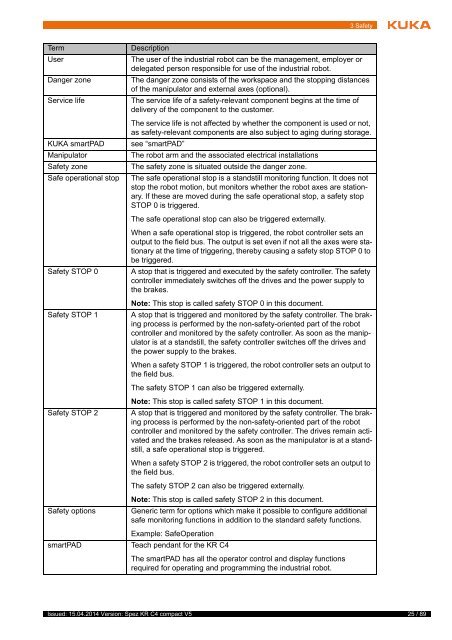
Term<br />
User<br />
Danger zone<br />
Service life<br />
<strong>KUKA</strong> smartPAD<br />
Manipulator<br />
Safety zone<br />
Safe operational stop<br />
Safety STOP 0<br />
Safety STOP 1<br />
Safety STOP 2<br />
Safety options<br />
smartPAD<br />
Description<br />
The user of the industrial robot can be the management, employer or<br />
delegated person responsible for use of the industrial robot.<br />
The danger zone consists of the workspace and the stopping distances<br />
of the manipulator and external axes (optional).<br />
The service life of a safety-relevant component begins at the time of<br />
delivery of the component to the customer.<br />
The service life is not affected by whether the component is used or not,<br />
as safety-relevant components are also subject to aging during storage.<br />
see “smartPAD”<br />
The robot arm and the associated electrical installations<br />
The safety zone is situated outside the danger zone.<br />
The safe operational stop is a standstill monitoring function. It does not<br />
stop the robot motion, but monitors whether the robot axes are stationary.<br />
If these are moved during the safe operational stop, a safety stop<br />
STOP 0 is triggered.<br />
The safe operational stop can also be triggered externally.<br />
When a safe operational stop is triggered, the robot controller sets an<br />
output to the field bus. The output is set even if not all the axes were stationary<br />
at the time of triggering, thereby causing a safety stop STOP 0 to<br />
be triggered.<br />
A stop that is triggered and executed by the safety controller. The safety<br />
controller immediately switches off the drives and the power supply to<br />
the brakes.<br />
Note: This stop is called safety STOP 0 in this document.<br />
A stop that is triggered and monitored by the safety controller. The braking<br />
process is performed by the non-safety-oriented part of the robot<br />
controller and monitored by the safety controller. As soon as the manipulator<br />
is at a standstill, the safety controller switches off the drives and<br />
the power supply to the brakes.<br />
When a safety STOP 1 is triggered, the robot controller sets an output to<br />
the field bus.<br />
The safety STOP 1 can also be triggered externally.<br />
Note: This stop is called safety STOP 1 in this document.<br />
A stop that is triggered and monitored by the safety controller. The braking<br />
process is performed by the non-safety-oriented part of the robot<br />
controller and monitored by the safety controller. The drives remain activated<br />
and the brakes released. As soon as the manipulator is at a standstill,<br />
a safe operational stop is triggered.<br />
When a safety STOP 2 is triggered, the robot controller sets an output to<br />
the field bus.<br />
The safety STOP 2 can also be triggered externally.<br />
Note: This stop is called safety STOP 2 in this document.<br />
Generic term for options which make it possible to configure additional<br />
safe monitoring functions in addition to the standard safety functions.<br />
Example: SafeOperation<br />
Teach pendant for the <strong>KR</strong> <strong>C4</strong><br />
The smartPAD has all the operator control and display functions<br />
required for operating and programming the industrial robot.<br />
Issued: 15.04.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> <strong>compact</strong> V5<br />
25 / 89














