

KR C4 compact - KUKA Robotics
KR C4 compact - KUKA Robotics
KR C4 compact - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 Planning<br />
4 Planning<br />
4.1 Electromagnetic compatibility (EMC)<br />
Description<br />
If connecting cables (e.g. field buses, etc.) are routed to the control PC from<br />
outside, only shielded cables with an adequate degree of shielding may be<br />
used. The cable shield must be connected with maximum surface area to the<br />
PE rail in the cabinet using shield terminals (screw-type, no clamps).<br />
The robot controller corresponds to EMC class A, Group 1, in accordance<br />
with EN 55011 and is intended for use in an industrial setting.<br />
Ascertaining the electromagnetic compatibility in other environments<br />
can result in difficulties due to conducted and radiated disturbance that may<br />
occur.<br />
4.2 Installation conditions<br />
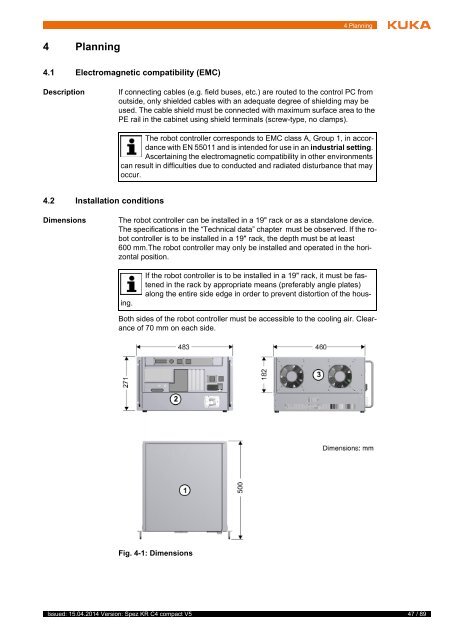
Dimensions<br />
The robot controller can be installed in a 19" rack or as a standalone device.<br />
The specifications in the “Technical data” chapter must be observed. If the robot<br />
controller is to be installed in a 19" rack, the depth must be at least<br />
600 mm.The robot controller may only be installed and operated in the horizontal<br />
position.<br />
If the robot controller is to be installed in a 19" rack, it must be fastened<br />
in the rack by appropriate means (preferably angle plates)<br />
along the entire side edge in order to prevent distortion of the housing.<br />
Both sides of the robot controller must be accessible to the cooling air. Clearance<br />
of 70 mm on each side.<br />
Fig. 4-1: Dimensions<br />
Issued: 15.04.2014 Version: Spez <strong>KR</strong> <strong>C4</strong> <strong>compact</strong> V5<br />
47 / 89














