Introduction to LabVIEW Control Design Toolkit by Finn Haugen ...
Introduction to LabVIEW Control Design Toolkit by Finn Haugen ...
Introduction to LabVIEW Control Design Toolkit by Finn Haugen ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
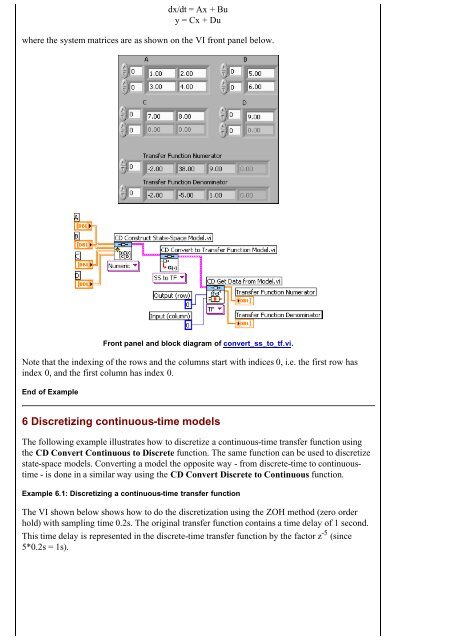
dx/dt = Ax + Bu<br />
y = Cx + Du<br />
where the system matrices are as shown on the VI front panel below.<br />
Front panel and block diagram of convert_ss_<strong>to</strong>_tf.vi.<br />
Note that the indexing of the rows and the columns start with indices 0, i.e. the first row has<br />
index 0, and the first column has index 0.<br />
End of Example<br />
6 Discretizing continuous-time models<br />
The following example illustrates how <strong>to</strong> discretize a continuous-time transfer function using<br />
the CD Convert Continuous <strong>to</strong> Discrete function. The same function can be used <strong>to</strong> discretize<br />
state-space models. Converting a model the opposite way - from discrete-time <strong>to</strong> continuoustime<br />
- is done in a similar way using the CD Convert Discrete <strong>to</strong> Continuous function.<br />
Example 6.1: Discretizing a continuous-time transfer function<br />
The VI shown below shows how <strong>to</strong> do the discretization using the ZOH method (zero order<br />
hold) with sampling time 0.2s. The original transfer function contains a time delay of 1 second.<br />
This time delay is represented in the discrete-time transfer function <strong>by</strong> the fac<strong>to</strong>r z -5 (since<br />
5*0.2s = 1s).