

Analysis for buckling and vibrations of composite ... - ResearchGate
Analysis for buckling and vibrations of composite ... - ResearchGate
Analysis for buckling and vibrations of composite ... - ResearchGate

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
362 R. Rikards et al. / Composite Structures 51 (2001) 361±370<br />
There is extensive literature <strong>for</strong> analysis <strong>of</strong> sti€ened<br />
plates <strong>and</strong> shells. For example, review <strong>and</strong> analysis <strong>of</strong><br />
<strong>buckling</strong> problems <strong>of</strong> sti€ened plates are presented in<br />
[16]. The eciency <strong>of</strong> the ®nite element method in<br />
comparison with other methods <strong>for</strong> analysis <strong>of</strong> sti€ened<br />
structures was shown.<br />
In the present paper, the equivalent layer theory<br />
based on the ®rst-order shear de<strong>for</strong>mation theory including<br />
extension <strong>of</strong> normal line (FOSDT-6) is employed<br />
in order to develop the ®nite element <strong>for</strong> analysis<br />
<strong>of</strong> laminated sti€ened shells. Previously, similar ®nite<br />
element was developed <strong>and</strong> applied <strong>for</strong> analysis <strong>of</strong><br />
smooth shells [17,18].<br />
2. Kinematics <strong>of</strong> shell<br />
Kinematic equations <strong>for</strong> the ®rst-order shear de<strong>for</strong>mation<br />
theory (FOSDT) including extension <strong>of</strong> the<br />
normal line can be obtained from the 3D equations <strong>of</strong><br />
the theory <strong>of</strong> elasticity by using a well-known ®rst-order<br />
approximation <strong>of</strong> a vector function with respect to the<br />
coordinate x 3 . Further a well-known geometric relations<br />
<strong>for</strong> the shell in normal coordinates (see, <strong>for</strong> example,<br />
[14]) are used.<br />
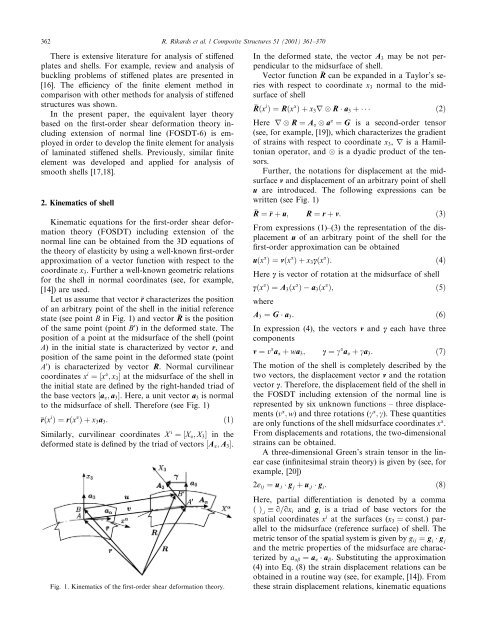
Let us assume that vector r characterizes the position<br />
<strong>of</strong> an arbitrary point <strong>of</strong> the shell in the initial reference<br />
state (see point B in Fig. 1) <strong>and</strong> vector R is the position<br />
<strong>of</strong> the same point (point B 0 ) in the de<strong>for</strong>med state. The<br />
position <strong>of</strong> a point at the midsurface <strong>of</strong> the shell (point<br />
A) in the initial state is characterized by vector r, <strong>and</strong><br />
position <strong>of</strong> the same point in the de<strong>for</strong>med state (point<br />
A 0 ) is characterized by vector R. Normal curvilinear<br />
coordinates x i ˆ‰x a ; x 3 Š at the midsurface <strong>of</strong> the shell in<br />
the initial state are de®ned by the right-h<strong>and</strong>ed triad <strong>of</strong><br />
the base vectors ‰a a ; a 3 Š. Here, a unit vector a 3 is normal<br />
to the midsurface <strong>of</strong> shell. There<strong>for</strong>e (see Fig. 1)<br />
r…x i †ˆr…x a †‡x 3 a 3 :<br />
…1†<br />
Similarly, curvilinear coordinates X i ˆ‰X a ; X 3 Š in the<br />
de<strong>for</strong>med state is de®ned by the triad <strong>of</strong> vectors ‰A a ; A 3 Š.<br />
Fig. 1. Kinematics <strong>of</strong> the ®rst-order shear de<strong>for</strong>mation theory.<br />
In the de<strong>for</strong>med state, the vector A 3 may be not perpendicular<br />
to the midsurface <strong>of</strong> shell.<br />
Vector function R can be exp<strong>and</strong>ed in a Taylor's series<br />
with respect to coordinate x 3 normal to the midsurface<br />
<strong>of</strong> shell<br />
R…x i †ˆR…x a †‡x 3 rR a 3 ‡<br />
…2†<br />
Here rR ˆ A a a a ˆ G is a second-order tensor<br />
(see, <strong>for</strong> example, [19]), which characterizes the gradient<br />
<strong>of</strong> strains with respect to coordinate x 3 , r is a Hamiltonian<br />
operator, <strong>and</strong> is a dyadic product <strong>of</strong> the tensors.<br />
Further, the notations <strong>for</strong> displacement at the midsurface<br />
v <strong>and</strong> displacement <strong>of</strong> an arbitrary point <strong>of</strong> shell<br />
u are introduced. The following expressions can be<br />
written (see Fig. 1)<br />
R ˆ r ‡ u; R ˆ r ‡ v: …3†<br />
From expressions (1)±(3) the representation <strong>of</strong> the displacement<br />
u <strong>of</strong> an arbitrary point <strong>of</strong> the shell <strong>for</strong> the<br />
®rst-order approximation can be obtained<br />
u…x a †ˆv…x a †‡x 3 c…x a †:<br />
…4†<br />
Here c is vector <strong>of</strong> rotation at the midsurface <strong>of</strong> shell<br />
c…x a †ˆA 3 …x a †a 3 …x a †;<br />
…5†<br />
where<br />
A 3 ˆ G a 3 :<br />
…6†<br />
In expression (4), the vectors v <strong>and</strong> c each have three<br />
components<br />
v ˆ v a a a ‡ wa 3 ; c ˆ c a a a ‡ ca 3 : …7†<br />
The motion <strong>of</strong> the shell is completely described by the<br />
two vectors, the displacement vector v <strong>and</strong> the rotation<br />
vector c. There<strong>for</strong>e, the displacement ®eld <strong>of</strong> the shell in<br />
the FOSDT including extension <strong>of</strong> the normal line is<br />
represented by six unknown functions ± three displacements<br />
(v a ; w) <strong>and</strong> three rotations (c a ; c). These quantities<br />
are only functions <strong>of</strong> the shell midsurface coordinates x a .<br />
From displacements <strong>and</strong> rotations, the two-dimensional<br />
strains can be obtained.<br />
A three-dimensional Green's strain tensor in the linear<br />
case (in®nitesimal strain theory) is given by (see, <strong>for</strong><br />
example, [20])<br />
2e ij ˆ u ;i g j ‡ u ;j g i :<br />
…8†<br />
Here, partial di€erentiation is denoted by a comma<br />
…† ;i<br />
o=ox i <strong>and</strong> g i is a triad <strong>of</strong> base vectors <strong>for</strong> the<br />
spatial coordinates x i at the surfaces (x 3 ˆ const:) parallel<br />
to the midsurface (reference surface) <strong>of</strong> shell. The<br />
metric tensor <strong>of</strong> the spatial system is given by g ij ˆ g i g j<br />
<strong>and</strong> the metric properties <strong>of</strong> the midsurface are characterized<br />
by a ab ˆ a a a b . Substituting the approximation<br />
(4) into Eq. (8) the strain displacement relations can be<br />
obtained in a routine way (see, <strong>for</strong> example, [14]). From<br />
these strain displacement relations, kinematic equations














