Development of Circularly Polarized Microstrip ... - CEReS - åè大å¦
Development of Circularly Polarized Microstrip ... - CEReS - åè大å¦
Development of Circularly Polarized Microstrip ... - CEReS - åè大å¦

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
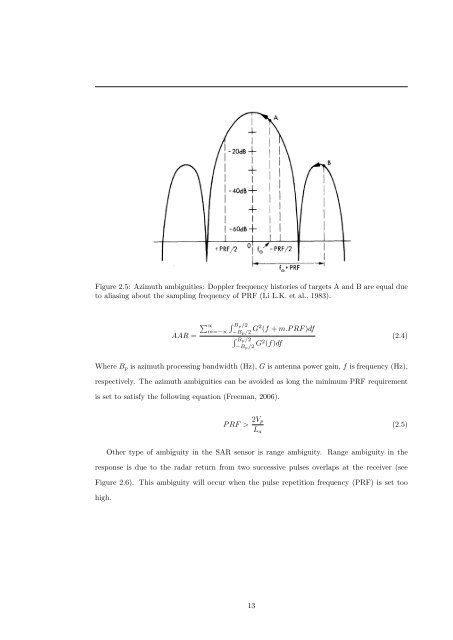
Figure 2.5: Azimuth ambiguities: Doppler frequency histories <strong>of</strong> targets A and B are equal due<br />
to aliasing about the sampling frequency <strong>of</strong> PRF (Li L.K. et al., 1983).<br />
AAR =<br />
∑ ∝<br />
m=−∝<br />
∫ Bp/2<br />
−B p/2 G2 (f + m.P RF )df<br />
∫ Bp/2<br />
−B p/2 G2 (f)df<br />
(2.4)<br />
Where B p is azimuth processing bandwidth (Hz), G is antenna power gain, f is frequency (Hz),<br />
respectively. The azimuth ambiguities can be avoided as long the minimum PRF requirement<br />
is set to satisfy the following equation (Freeman, 2006).<br />
P RF > 2V p<br />
L a<br />
(2.5)<br />
Other type <strong>of</strong> ambiguity in the SAR sensor is range ambiguity. Range ambiguity in the<br />
response is due to the radar return from two successive pulses overlaps at the receiver (see<br />
Figure 2.6). This ambiguity will occur when the pulse repetition frequency (PRF) is set too<br />
high.<br />
13