Error Correction in Vector Network Analyzers - SDR-Kits
Error Correction in Vector Network Analyzers - SDR-Kits
Error Correction in Vector Network Analyzers - SDR-Kits

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
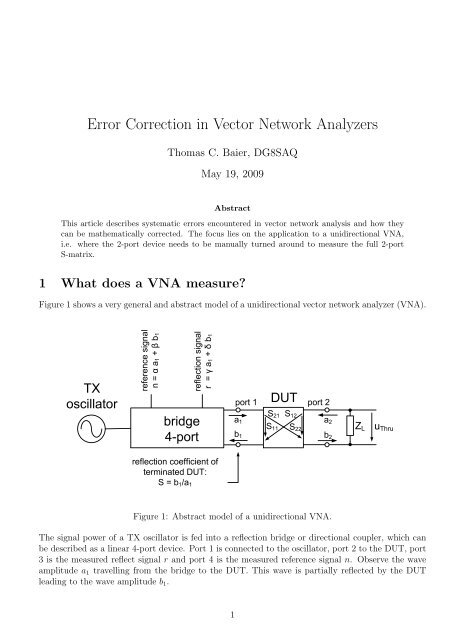
<strong>Error</strong> <strong>Correction</strong> <strong>in</strong> <strong>Vector</strong> <strong>Network</strong> <strong>Analyzers</strong>Thomas C. Baier, DG8SAQMay 19, 2009AbstractThis article describes systematic errors encountered <strong>in</strong> vector network analysis and how theycan be mathematically corrected. The focus lies on the application to a unidirectional VNA,i.e. where the 2-port device needs to be manually turned around to measure the full 2-portS-matrix.1 What does a VNA measure?Figure 1 shows a very general and abstract model of a unidirectional vector network analyzer (VNA).TXoscillatorreference signaln = a1 + b1bridge4-portreflection signalr = a1 + b1DUTport 1 port 2S 21 S 12a 1 a 2S 11 S 22 Z L u Thrub 1b 2reflection coefficient ofterm<strong>in</strong>ated DUT:S = b 1 /a 1Figure 1: Abstract model of a unidirectional VNA.The signal power of a TX oscillator is fed <strong>in</strong>to a reflection bridge or directional coupler, which canbe described as a l<strong>in</strong>ear 4-port device. Port 1 is connected to the oscillator, port 2 to the DUT, port3 is the measured reflect signal r and port 4 is the measured reference signal n. Observe the waveamplitude a 1 travell<strong>in</strong>g from the bridge to the DUT. This wave is partially reflected by the DUTlead<strong>in</strong>g to the wave amplitude b 1 .1
1.1 Measur<strong>in</strong>g 1-port reflection coefficientsThe reflection coefficient S of the DUT <strong>in</strong>put with its output term<strong>in</strong>ated by Z L can be determ<strong>in</strong>edfrom these wave amplitudes by equation 1.S = b 1a 1(1)An ideal VNA would measure a 1 as reference signal and b 1 as reflect signal and calculate the reflectioncoefficient S accord<strong>in</strong>g to equation 1. S<strong>in</strong>ce the reflection bridge shown <strong>in</strong> figure 1 is a l<strong>in</strong>ear 4-portdevice, the signals at any port can always be described as a l<strong>in</strong>ear comb<strong>in</strong>ation of the wave amplitudesa 1 and b 1 . Thus, the reflect and reference signals are of the follow<strong>in</strong>g form:And the measurement result M is:By virtue of equation 1 we obta<strong>in</strong> the follow<strong>in</strong>g result:r = γa 1 + δb 1 (2)n = αa 1 + βb 1 (3)M = r n = γa 1 + δb 1αa 1 + βb 1(4)M = γ + δSα + βS(5)This function is called a Moebius 1 transform. It actually conta<strong>in</strong>s only 3 <strong>in</strong>dependent parametersas one of {α,β,γ,δ} can be divided out. Thus, without loss of generality, M can be written <strong>in</strong> thefollow<strong>in</strong>g way:M = S + a(6)bS + cIf the three parameters {a,b,c} are known, the <strong>in</strong>put reflection coefficient S of the DUT can becalculated from the measurement result M by <strong>in</strong>vert<strong>in</strong>g equation 6:S = a − cMbM − 1(7)The determ<strong>in</strong>ation of the parameters {a,b,c} is quite simple. It is just necessary to measure threecalibration standards with well known reflection coefficients, e.g. {S O ,S S ,S L }. Usually, but notnecessarily, an open a short and a load calibration standard are used. Measur<strong>in</strong>g these, one obta<strong>in</strong>sthe measurement results {M O ,M S ,M L }, where by virtue of equation 6:M O = S O + abS O + cM S = S S + abS S + cM L = S L + abS L + c(8)(9)(10)1 August Ferd<strong>in</strong>and Moebius, 1790-1868, German mathematician and astronomer2
These 3 equations for the 3 unknowns {a,b,c} can easily be solved:M L (M O − M S )a =M L (M O + M S ) − 2M O M S(11)2M L − M O − M Sb =M L (M O + M S ) − 2M O M S(12)M O − M Sc =M L (M O + M S ) − 2M O M S(13)Thus, us<strong>in</strong>g equation 7 together with the now known parameters {a,b,c}, we can determ<strong>in</strong>e thereflection coefficient regardless of the details of the reflection bridge. Note, that also the outputimpedance of the reflection bridge Z S is of no importance here.How can we <strong>in</strong>terpret the parameters {a,b,c}?Equation 6 can be rewritten <strong>in</strong>to the formM =S + ac( b c S + 1) (14)The parameter a is closely related to what is called the directivity error [1]. If the ga<strong>in</strong> of the reflectsignal or the reference signal changes, only c will change, that is why c is called a track<strong>in</strong>g error[1]. To understand the mean<strong>in</strong>g of the quotient b/c is not so simple. Let’s assume that deep <strong>in</strong>sideour reflection bridge there is an ideal reflection bridge with source impedance equal to the referenceimpedance Z 0 , which is usually 50Ω. This impedance is transformed to the real port impedance Z Sby an error network described by an S-parameter matrix E ij . This is shown <strong>in</strong> figure 2. The realTXoscillatormeasured signalM = b 1 /a 1idealbridgeZ 0virtualport 1errornetworkrealport 2a E 21 E 121 a 2E 11 E 22 Z Sb 1b 2DUT withreflectioncoefficient SFigure 2: Real VNA bridge built up from an ideal VNA bridge and an error network.bridge’s output impedance Z S correspond<strong>in</strong>g to an output reflection coefficientS S = b ∣2 ∣∣∣a1= E 22 (15)a 2 =0Now, what would our VNA measure due to the error network if port 2 was term<strong>in</strong>ated with animpedance Z with correspond<strong>in</strong>g reflection coefficient S? This is calculated <strong>in</strong> the Appendix A.1.Us<strong>in</strong>g equation 64 and the abbreviation ∆ E = E 11 E 22 − E 12 E 21 we obta<strong>in</strong>M = Γ <strong>in</strong> = b 1= ∆ ES − E 11a 1 E 22 S − 1(16)3
Divid<strong>in</strong>g enumerator and denom<strong>in</strong>ator by ∆ E we obta<strong>in</strong>This is exactly of the same form as equation 6. By <strong>in</strong>spection we f<strong>in</strong>dNow we can calculate b/c:M = S − E 11∆ EE 22(17)∆ ES − 1∆ Ea = − E 11∆ E(18)b = E 22∆ E(19)c = − 1∆ E(20)Eb22c = ∆ E− 1∆ E= −E 22 (21)And we f<strong>in</strong>ally f<strong>in</strong>d the real port 2 reflection coefficient S S correspond<strong>in</strong>g to the output impedanceof the real bridge Z S :S S = E 22 = − b c2 Measur<strong>in</strong>g 2-port S-parameters2.1 Reflection measurementAs we have seen above, the bridge output impedance is of no importance when measur<strong>in</strong>g 1-portreflection coefficients. This picture dramatically changes, when 2-port S-parameters are to be measuredwith the VNA depicted <strong>in</strong> figure 1. In the latter case, both impedances of the VNA, namelythe bridge output impedance Z S and the detector impedance Z L , both term<strong>in</strong>at<strong>in</strong>g the DUT, will<strong>in</strong>fluence the measurement result M. This is quite obvious for the reflection measurements whenlook<strong>in</strong>g at equation 61 from the appendix and replac<strong>in</strong>g S by S L . The <strong>in</strong>put reflection coefficient ofour DUT <strong>in</strong> forward direction f is(22)S f = S 11 + S LS 12 S 211 − S 22 S L(23)If the detector impedance Z L is equal to the reference impedance Z 0 , which means S L = 0, equation23 reduces to S f = S 11 . Note, that <strong>in</strong> the general case S f depends on all four S-parameters of theDUT.If we want to measure the output reflection coefficient <strong>in</strong> backward direction b by turn<strong>in</strong>g the DUTaround, we have to exchange <strong>in</strong>dices 1 and 2 <strong>in</strong> equation 23:S b = S 22 + S LS 21 S 121 − S 11 S L(24)4
2.2 Transmission measurementsWhen do<strong>in</strong>g a transmission measurement τ, one evaluates the quotient of the detector voltage u detdivided by the reference signal n. Here we assume u det to be normalized with respect to the referenceimpedance Z 0 like the reference signal n and the reflect signal r. Thus, u det can simply be written<strong>in</strong> terms of wave amplitudesThus the forward transmission signal readsUs<strong>in</strong>g equation 59, we can replace b 2 :The second quotient can be simplified tou det = a 2 + b 2 = b 2 S L + b 2 = b 2 (1 + S L ) (25)τ f = u detn = b 2(1 + S L )αa 1 + βb 1(26)τ f = (1 + S L)S 21 a 1·(27)1 − S 22 S L αa 1 + βb 1a 1αa 1 + βb 1=1=α + β b 1a 11α + βS f(28)Next we want to normalize τ f by a thru calibration measurement τ Thru . An ideal thru calibrationstandard yields S 11 = S 22 = 0 and S 12 = S 21 = 1. Thus for the thru calibration measurementequation 27 becomesτ Thru = (1 + S L ) ·a Tαa T + βb T= 1 + S Lα + β b TaT= 1 + S Lα + βS L(29)Note that the wave amplitudes depend on the DUT and are different <strong>in</strong> equation 29 from those <strong>in</strong>equation 27. Now we can normalize the forward transmission signal divid<strong>in</strong>g it by the thru calibrationmeasurement:T f =τ fτ Thru=(1+S L )S 21 11−S 22 S L·α+βS f1+S L=α+βS LS 211 − S 22 S L· α + βS Lα + βS f=S 211 − S 22 S L· 1 + β α S L1 + β α S f(30)Note, that β/α = b/c = −S S as can be seen from equations 5, 6 and 22. Thus we f<strong>in</strong>dT f =S 211 − S 22 S L· 1 − S SS L1 − S S S f(31)We can f<strong>in</strong>d the backward thru response from this by swapp<strong>in</strong>g <strong>in</strong>dices 1 and 2 and replac<strong>in</strong>g subscriptf by b.S 12T b = · 1 − S SS L(32)1 − S 11 S L 1 − S S S bNow, we have a set of 4 measurement results S f , S b , T f and T b (equations 23, 24, 31, 32), which alldepend on all four S-parameters S 11 , S 12 , S 21 , S 22 to be determ<strong>in</strong>ed. Note that all parameters are5
known or can be measured, namely a, b, c and S S = −b/c are known from the reflect calibration andS L can be measured with the reflect calibrated bridge dur<strong>in</strong>g the thru calibration.It rema<strong>in</strong>s to solve equations 23, 24, 31 and 32 for the unknown S-parameters S 11 , S 12 , S 21 , S 22 , sothe VNA can actually calculate the S-parameters from the measurement results.2.3 Calculat<strong>in</strong>g the S-parameters from the measurement resultsThe follow<strong>in</strong>g normalization steps are not straight forward but were made to br<strong>in</strong>g my equations tothe same form as those published by Agilent [1]. In that course, my error terms can be compared toAgilent’s notation.First, the reflect measurements from equations 23 and 24 are rewritten. These reflection coefficientscan be transformed to the uncalibrated measurement results M F and M B by virtue of equation 6Now we perform a renormalization:M f = S f + abS f + cM b = S b + abS b + c(33)(34)M 11 = c2 M f − acc − ab= cS fbS f + c(35)M 22 = c2 M b − acc − abWe also renormalize the thru measurements T f and T b := cS bbS b + c(36)M 21 =M 12 =T f1 − S S S L(37)T b1 − S S S L(38)As can easily be seen 2 , solv<strong>in</strong>g these M ij for the desired S-parameters yields2 Remark of the author: after several pages of tedious calculations6
S 11 = M 11(M 22 S S + 1) − M 12 M 21 S LDS 21 = M 21(1 − M 22 (S L − S S ))D(39)(40)S 22 = M 22(M 11 S S + 1) − M 12 M 21 S LDS 12 = M 12(1 − M 11 (S L − S S ))D(41)(42)D = (S S M 11 + 1)(S S M 22 + 1) − S 2 LM 12 M 21 (43)These equations are identical with those published <strong>in</strong> Agilent’s paper [1] on page 20 if the identificationsdescribed <strong>in</strong> appendix A.2 are applied.Now, just for completeness, we can replace the M ij -terms through equations 35-38:∆ = b 2 S 2 L(S b S f T b T f − 1) + bcS L (S b S L T b T f + S f S L T b T f − 2) + c 2 (S 2 LT b T f − 1) (44)S 11 = b2 S f S L (S b T b T f − S L ) + bcS L (S b T b T f + S f (T b T f − 2)) + c 2 (S L T b T f − S f )∆S 21 = T f(bS f + c)(bS L + c)(S b S L − 1)∆S 22 = b2 S b S L (S f T b T f − S L ) + bcS L (S b (T b T f − 2) + S f T b T f ) + c 2 (S L T b T f − S b )∆S 12 = T b(bS b + c)(bS L + c)(S f S L − 1)∆(45)(46)(47)(48)7
Assum<strong>in</strong>g that the detector has an ideal match, i.e. S L = 0, these equations reduce toS 11 = S f (49)S 21 = T f (1 + b c S f)= T f (1 − S S S f ) (50)= T fa · b − cc(b · M f − 1)S 22 = S b (51)S 12 = T b (1 + b c S b)= T b (1 − S S S b ) (52)= T ba · b − cc(b · M b − 1)Note that <strong>in</strong> the last four equations equations the forward and backward directions are decoupled.This might be a good alternative if only one signal direction can be measured and Z L is close to Z 0 .Generally, Z L can be controlled more easily than Z S . Also note, that these decoupled equations stillcompensate for a nonperfect bridge output impedance Z S .An even better approximation for the transmission correction is the so called ”enhanced responsecalibration” (ERC) [3]. It can be derived from equation 31 by sett<strong>in</strong>g S 22 = 0.S 21 = T f · 1 − S SS 111 − S S S L(53)By do<strong>in</strong>g so, one suppresses multiple reflections between DUT output and detector <strong>in</strong>put. This is agood approximation for reasonably well matched DUTs. For highly mismatched DUTs this can stillbe a good approximation, if the detector reflection coefficient S L is close to zero as was shown <strong>in</strong> theprevious approximation.2.4 Isolation calibrationSo far, we have only made use of 5 <strong>in</strong>dependent parameters <strong>in</strong> our calibration scheme, namely a, b, c,S L and τ Thru <strong>in</strong> forward direction. The same 5 parameters are recycled for the backward direction.So, we have used a total of calibration 10 parameters so far, which means 2 parameters are miss<strong>in</strong>g toa 12-term error correction. The two miss<strong>in</strong>g parameters are the <strong>in</strong>strument isolation <strong>in</strong> forward andbackward direction. For the unidirectional VNA both are identical. As can be seen from Agilent’sequations 74 and 76, the isolation measurement is simply subtracted from the thru measurement.This is only an approximation. It does not take <strong>in</strong>to account that the isolation may depend on theterm<strong>in</strong>ations of the TX and RX ports. Still, it is useful if either the isolation is very good or if the8
dependencies on TX and RX port term<strong>in</strong>ations are weak.AAppendixA.1 Relationship between <strong>in</strong>put reflection coefficient and output term<strong>in</strong>ationof a 2-porta 1port 1 port 2S 21 S 12 a 2S 11 S 22b 1b 2two port deviceaS b22Z ZZ Z00Figure 3: Two-port device term<strong>in</strong>ated with impedance Z.The follow<strong>in</strong>g relationship hold between the wave amplitudes shown <strong>in</strong> figure 3:( ) ( ) ( )b1 S11 S= 12 a1·b 2 S 21 S 22 a 2(54)This can also be written as two scalar equations:b 1 = S 11 a 1 + S 12 a 2 (55)b 2 = S 21 a 1 + S 22 a 2 (56)S<strong>in</strong>ce the wave b 2 is reflected by the term<strong>in</strong>ation impedance Z with correspond<strong>in</strong>g reflection coefficientS, we can write:S = a 2b 2(57)or by virtue of equation 56Solv<strong>in</strong>g for b 2 we obta<strong>in</strong>b 2 = S 21 a 1 + S 22 Sb 2 (58)b 2 = S 21a 11 − SS 22(59)Now we can calculate the <strong>in</strong>put reflection coefficient for port 1 from equation 55:Γ <strong>in</strong> = b 1a 1= S 11 + S 12a 2a 1(60)Insert<strong>in</strong>g b 2 from 56 leads toΓ <strong>in</strong> = S 11 + SS 12S 211 − S 22 S9(61)
Br<strong>in</strong>g<strong>in</strong>g this to a common denom<strong>in</strong>atorΓ <strong>in</strong> = (S 11S 22 − S 12 S 21 )S − S 11S 22 S − 1(62)and us<strong>in</strong>g an abbreviation for the determ<strong>in</strong>ant of the S-matrix∆ S = S 11 S 22 − S 12 S 21 (63)we obta<strong>in</strong> the f<strong>in</strong>al resultΓ <strong>in</strong> = b 1= ∆ SS − S 11a 1 S 22 S − 1(64)A.2 Identifications of Agilent’s error termsThe error terms <strong>in</strong> [1] can be identified with ours.A.2.1Forward error termse 11 = S S = − b c(65)e 22 = S L (66)e 00 = a c(67)e 10 e 01 = 1 c − abc 2 (68)Note that e 10 e 32 is related to the thru calibration. It is effectively removed <strong>in</strong> our equations bywork<strong>in</strong>g with the renormalized M ij ’s , see section A.2.3.A.2.2Backward error termse ′ 11 = S L (69)e ′ 22 = S S = − b c(70)e ′ 33 = a c(71)e ′ 23e ′ 32 = 1 c − abc 2 (72)Note that e ′ 23e ′ 01 is related to the thru calibration. It is effectively removed <strong>in</strong> our equations bywork<strong>in</strong>g with the renormalized M ij ’s , see section A.2.3.10
A.2.3 M ij -TermsS 11M − e 00e 10 e 01= M 11 = c2 M f − acc − ab= cS fbS f + c(73)S 21M − e 30e 10 e 32= M 21 =T f1 − S S S L(74)S 22M − e ′ 33e ′ 23e ′ 32= M 22 = c2 M b − acc − ab= cS bbS b + c(75)S 12M − e ′ 03e ′ 23e ′ 01= M 12 =T b1 − S S S L(76)11
A.3 Comparison of notationsThe follow<strong>in</strong>g translation table is useful when compar<strong>in</strong>g literature results from various sources.HP notation [2] vs. Agilent notation [1] vs. my notationForward direction:Backward direction:E DF = e 00 = a c(77)E SF = e 11 = S S (78)E RF = e 10 e 01 = 1 c − abc 2 (79)E LF = e 22 = S L (80)E TF = e 10 e 32 = τ Thru · (1 − S S S L ) (thru cal measurement) (81)E XF = e 30 (isolation) (82)S 21M = S 21M = τ f (83)S 11M = S 11M = M f (84)E DR = e ′ 33 = a c(86)E SR = e ′ 22 = S S (87)E RR = e ′ 23e ′ 32 = 1 c − abc 2 (88)E LR = e ′ 11 = S L (89)(85)E TR = e ′ 23e ′ 01 = τ Thru · (1 − S S S L ) (thru cal measurement) (90)E XR = e ′ 03 (isolation) (91)S 12M = S 12M = τ b (92)S 22M = S 22M = M b (93)(94)12
References[1] Doug Rytt<strong>in</strong>g, ”<strong>Network</strong> Analyzer <strong>Error</strong> Models and Calibration Methods”, Agilent.The pdf document can be downloaded from:http://cpd.ogi.edu/IEEE-MTT-ED/<strong>Network</strong>%20Analyzer%20<strong>Error</strong>%20Models%20and%20Calibration%20Methods.pdf[2] User’s Guide, HP 8753D <strong>Network</strong> Analyzer, Hewlett-Packard.The pdf document can be downloaded from:http://cp.literature.agilent.com/litweb/pdf/08753-90257.pdf[3] Agilent application note AN 1287-3: ”Apply<strong>in</strong>g <strong>Error</strong> <strong>Correction</strong> to <strong>Network</strong> Analyzer Measurements”The pdf document can be downloaded from:http://cp.literature.agilent.com/litweb/pdf/5965-7709E.pdfBAcknowledgementsMany thanks to Paul Kiciak N2PK, who brought up this subject to me and who showed me thatthe 12-term correction scheme is also feasible to unidirectional VNAs. He has brought the enhancedresponse calibration to my notice. He has also provided me with lots of literature and was alwayswill<strong>in</strong>g to discuss my results. Last but not least he revued this document and helped to get the bugsout.13