

KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics
KR QUANTEC PA - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong><br />
5.4 Overview of protective equipment<br />
5.4.1 Mechanical end stops<br />
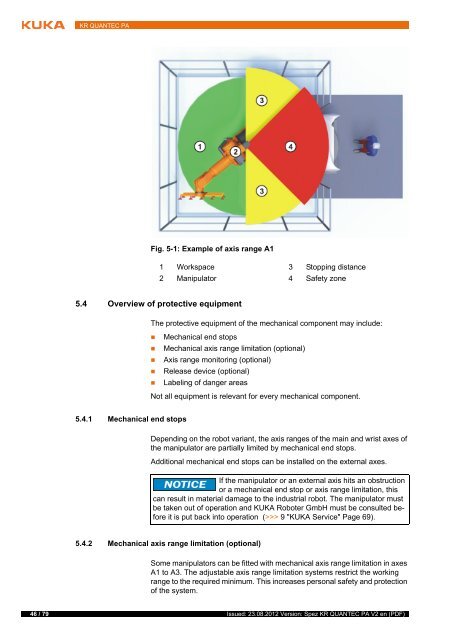
Fig. 5-1: Example of axis range A1<br />
1 Workspace 3 Stopping distance<br />
2 Manipulator 4 Safety zone<br />
The protective equipment of the mechanical component may include:<br />
� Mechanical end stops<br />
� Mechanical axis range limitation (optional)<br />
� Axis range monitoring (optional)<br />
� Release device (optional)<br />
� Labeling of danger areas<br />
Not all equipment is relevant for every mechanical component.<br />
Depending on the robot variant, the axis ranges of the main and wrist axes of<br />
the manipulator are partially limited by mechanical end stops.<br />
Additional mechanical end stops can be installed on the external axes.<br />
If the manipulator or an external axis hits an obstruction<br />
or a mechanical end stop or axis range limitation, this<br />
can result in material damage to the industrial robot. The manipulator must<br />
be taken out of operation and <strong>KUKA</strong> Roboter GmbH must be consulted before<br />
it is put back into operation (>>> 9 "<strong>KUKA</strong> Service" Page 69).<br />
5.4.2 Mechanical axis range limitation (optional)<br />
Some manipulators can be fitted with mechanical axis range limitation in axes<br />
A1 to A3. The adjustable axis range limitation systems restrict the working<br />
range to the required minimum. This increases personal safety and protection<br />
of the system.<br />
46 / 79 Issued: 23.08.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>PA</strong> V2 en (PDF)














