

design and construction of mobile surveillance robot
design and construction of mobile surveillance robot
design and construction of mobile surveillance robot

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
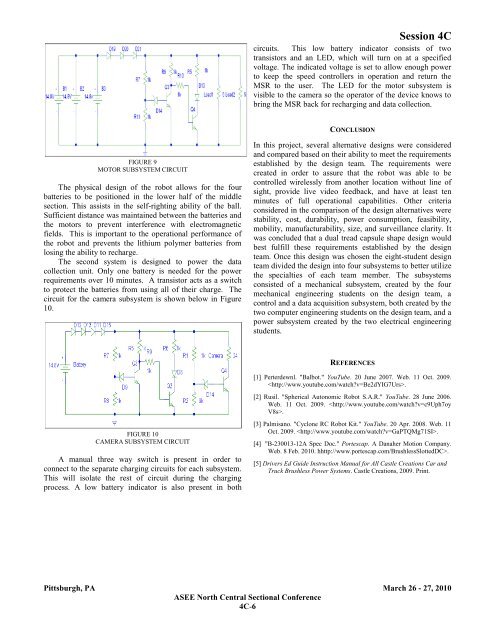
Session 4Ccircuits. This low battery indicator consists <strong>of</strong> twotransistors <strong>and</strong> an LED, which will turn on at a specifiedvoltage. The indicated voltage is set to allow enough powerto keep the speed controllers in operation <strong>and</strong> return theMSR to the user. The LED for the motor subsystem isvisible to the camera so the operator <strong>of</strong> the device knows tobring the MSR back for recharging <strong>and</strong> data collection.CONCLUSIONFIGURE 9MOTOR SUBSYSTEM CIRCUITThe physical <strong>design</strong> <strong>of</strong> the <strong>robot</strong> allows for the fourbatteries to be positioned in the lower half <strong>of</strong> the middlesection. This assists in the self-righting ability <strong>of</strong> the ball.Sufficient distance was maintained between the batteries <strong>and</strong>the motors to prevent interference with electromagneticfields. This is important to the operational performance <strong>of</strong>the <strong>robot</strong> <strong>and</strong> prevents the lithium polymer batteries fromlosing the ability to recharge.The second system is <strong>design</strong>ed to power the datacollection unit. Only one battery is needed for the powerrequirements over 10 minutes. A transistor acts as a switchto protect the batteries from using all <strong>of</strong> their charge. Thecircuit for the camera subsystem is shown below in Figure10.In this project, several alternative <strong>design</strong>s were considered<strong>and</strong> compared based on their ability to meet the requirementsestablished by the <strong>design</strong> team. The requirements werecreated in order to assure that the <strong>robot</strong> was able to becontrolled wirelessly from another location without line <strong>of</strong>sight, provide live video feedback, <strong>and</strong> have at least tenminutes <strong>of</strong> full operational capabilities. Other criteriaconsidered in the comparison <strong>of</strong> the <strong>design</strong> alternatives werestability, cost, durability, power consumption, feasibility,mobility, manufacturability, size, <strong>and</strong> <strong>surveillance</strong> clarity. Itwas concluded that a dual tread capsule shape <strong>design</strong> wouldbest fulfill these requirements established by the <strong>design</strong>team. Once this <strong>design</strong> was chosen the eight-student <strong>design</strong>team divided the <strong>design</strong> into four subsystems to better utilizethe specialties <strong>of</strong> each team member. The subsystemsconsisted <strong>of</strong> a mechanical subsystem, created by the fourmechanical engineering students on the <strong>design</strong> team, acontrol <strong>and</strong> a data acquisition subsystem, both created by thetwo computer engineering students on the <strong>design</strong> team, <strong>and</strong> apower subsystem created by the two electrical engineeringstudents.REFERENCES[1] Perterdewnl. "Balbot." YouTube. 20 June 2007. Web. 11 Oct. 2009..[2] Rusil. "Spherical Autonomic Robot S.A.R." YouTube. 28 June 2006.Web. 11 Oct. 2009. .FIGURE 10CAMERA SUBSYSTEM CIRCUITA manual three way switch is present in order toconnect to the separate charging circuits for each subsystem.This will isolate the rest <strong>of</strong> circuit during the chargingprocess. A low battery indicator is also present in both[3] Palmisano. "Cyclone RC Robot Kit." YouTube. 20 Apr. 2008. Web. 11Oct. 2009. .[4] "B-230013-12A Spec Doc." Portescap. A Danaher Motion Company.Web. 8 Feb. 2010. hhttp://www.portescap.com/BrushlessSlottedDC>.[5] Drivers Ed Guide Instruction Manual for All Castle Creations Car <strong>and</strong>Truck Brushless Power Systems. Castle Creations, 2009. Print.Pittsburgh, PA March 26 - 27, 2010ASEE North Central Sectional Conference4C-6












