Vehicle control and drowsiness - VTI
Vehicle control and drowsiness - VTI
Vehicle control and drowsiness - VTI
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
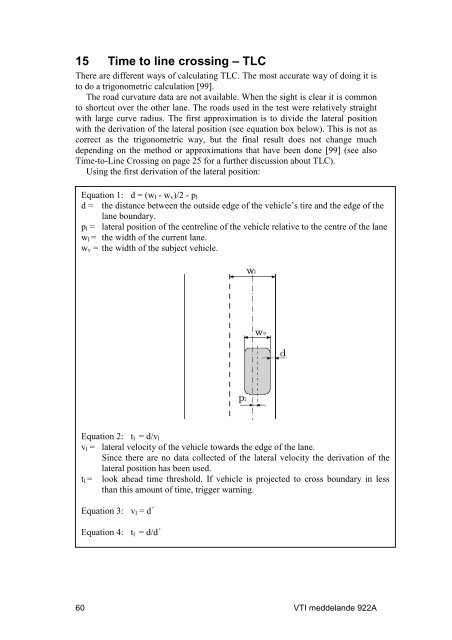
15 Time to line crossing – TLCThere are different ways of calculating TLC. The most accurate way of doing it isto do a trigonometric calculation [99].The road curvature data are not available. When the sight is clear it is commonto shortcut over the other lane. The roads used in the test were relatively straightwith large curve radius. The first approximation is to divide the lateral positionwith the derivation of the lateral position (see equation box below). This is not ascorrect as the trigonometric way, but the final result does not change muchdepending on the method or approximations that have been done [99] (see alsoTime-to-Line Crossing on page 25 for a further discussion about TLC).Using the first derivation of the lateral position:Equation 1: d = (w l - w v )/2 - p ld = the distance between the outside edge of the vehicle’s tire <strong>and</strong> the edge of thelane boundary.p l = lateral position of the centreline of the vehicle relative to the centre of the lanew l = the width of the current lane.w v = the width of the subject vehicle.Equation 2: t l = d/v lv l = lateral velocity of the vehicle towards the edge of the lane.Since there are no data collected of the lateral velocity the derivation of thelateral position has been used.t l = look ahead time threshold. If vehicle is projected to cross boundary in lessthan this amount of time, trigger warning.Equation 3: v l = d´Equation 4: t l = d/d´60 <strong>VTI</strong> meddel<strong>and</strong>e 922A