mb31 delta 2 h&c (bg.. - Free
mb31 delta 2 h&c (bg.. - Free
mb31 delta 2 h&c (bg.. - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2)The mains power connection BETA DRIVE - HOTOR (Wires 1 1, 12,13 + Earth) must run through the same multiconductor (armoured)cable or be fed into a seperate steel conduit which should be earthedat both ends. The shortest route possible should be chosen, inparti cul ar the i ncomi ng mains suppl y cab1 es.3)The other BETA DRIVE - MOTOR connections, more specificall y thebrake (+BR, -BR) and the thermistor (OV, STH) if Delta system,can run through the same steel conduit but they must be at least 10cms from the incoming mains suppl y condui t.INSTALLATION EXAHPLE:METAL TUBE EARTHED ONBOTH SIDES.L 1, L2, L3 and EARTH. 11, 12, 13 and EARTH.LI==Mainsl3 DriveIsolataController 4 15-@L 1, NEUTRAL.Thermistor.VF Brake.INPUT SIGNALS FROM TRA 1 L l NG CABLE. to 003EXISTING CDNTROLLER.TAPEHEAD ON CAR.Please ensure incoming mains cable and motor cables do notrun near each other. Ensure separation by approximately100mm - 150mm.4) When the machinery is si tuated near a television aerial , it must bearranged sa that the controller and the motar are not lined upbetwèen the aerial and the transmitter.GOOD !Transmi t ter-Televisioniif- aerial.Transmi tter.
MINIMUM CONNECTIONS FOR TEST RUNS,ELECTRO-MECHANICAL TERMINALS.ATTENTION ! ! !BE CAREFUL NOT TO CONNECT THE MAIN LlNE LI, L2 AND L3 TO 1 1,12, AND 13 AS THIS MAYRESULT IN THE DISTRUCTION OF THE OUTPUT TRANSISTORS.DO NOT FORGET TO PASS THE MOTOR WIRES THROUGH A METAL COYER (CONDUIT) WHlCHHAS ONE SlDE CONNECTED TO THE GROUND.MAKE SURE THE VOLTAGE OF THE BRAKE COlL IS THE SAME AS PROVIDED IN +BR AND -BR.IN ORDER FOR THE CAR TO HOVE, THE SAFETY CIRCUIT HAS TO BE MADE, THE THREE LED'SLOCATED ON THE BOARD CALLED 6,8 AND 10 MUST BE LIT.
TYPE 03 Connection:Example uçing the BERINGER ELRV unit with 2 valves.~~~~P IDFJvuvavavType of hy draulicA , 5,-GMV-MART 3VVMLVMDVMP00H / C. 6OK.DFVUFVDSVUSVO 1DOVER 12.DFVUFVDSVUSV02BERINGER-ElecK3K 1K4K203SPECIFIC.GVDGVMPVDPYM04IBERINGER POWER MODIJLENOTE :FOR 018 AND D25, THE L CONTACTS ARE 53/54, AND THE S AND D CONTACTS ARE 51 152-FOR D40 TO D80, THE L CONTACTS ARE 1 311 4, AND THE S AND 0 CONTACTS ARE 51 /52.
41 LOCATION AND FUNCTION OF FUSES IN BETA DRIVEAND DELTA 2 LOGlC CONTROLLER.FU 1 ( 2A) FU 1 ( 1,614) and FU10f0,SA) FU11(1,6A)Safety circuit FU 2 ( 1,6A) Emergency EmergencyFU( 5A) protection; +24and+5Y. FUSI1.,6A) battery charger batteryBrake ~ U P P ~ Y ( 1 1 O%/).SUPP~ Y Door motor protection. protection.function.Dim : 5 x 20. protection. injection Dim:5x20. Dim:5x20Pim: 5 x 20.Dim : 5 x 20. suppl y protection.FU+ (16A) f FU 3 (54) Gd L3P (2A) (GF) LI PA, ~ 2 ~ L3PA 4 ,540V suppl y 3 (ZA) (GF)protection. protection. for t he phase Prc~tection of theIGBT: rslay option. i ri put phase for the2514 - 16AGf protection. door operator.50A - 25AGf Dim : 5 x 20. Dim : 8,5 x 31,575A - 40A Gf1 OOA - 504 Gf FuVE ( 0,5A ) FIJ COMB ( l,6A 1 LlP, LZP 2x (44) (GF)150A - 634 Gf Electric fan Common calli ng Pri mary contra1protection. + sendi ng button transformer protection.Dim:5x20 protection. Dim : 8,5x 31,5.22/03/84 Dirn: 5x 20.
MAIN BOARD NlO.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .TRANSFORMER TAR 1 9 1.THE POSITION OF THE COMPONENTS:Tl =TRANSISTOR 1.T2 = TRANSISTOR 2.T3 - TRANSISTOR 3.TR - REGENERATIVE TRANSISTOR.RD = DISCHARGING RESISTOR.RT - THREE PHASE RECTIFIER.RP - PRECISION RESISTOR (1 x 0,0680).15 DETAILED PAGE 7. CHAPTER 4.LOCATION AND FUNCTION OF FUSES '.CHARACTERISTICS OF TUE TAR 1 91 TRANSFORMERQuaiity of magnetic metal sheet: Varnished copper Coillmpregnated under vacuum and pressure.Acceptable intensities:Primary 220 380 V63/100 0.86A 50/100 0.57A.Secondary N" 1 QV/18V 75/100 1.32A.N'2 55/110/190V75/100 1.32A.N'3 16V 118/100 3.16AThe figures are given when operatlng al a constant speed.They are hlgher when the speed 1s irregular.The power of the transformer is ln the rcglon of 200VA.Insulation Class E.Dimensions: LengthlOB Wldth 90 Height 120Weight 4 S00 Kg.MOTORS - TRANSFORMERIGBT 25A.HAMMOND + CHAMPNESS BETA DRIVEDELTA 2 LOGlC CONTROLLER.
TRANSFORMER TAR 191Controller Type : BETA DRIVE+MOTEURS - TRANSFORMER * DELTA 2 LOGIC CONTROLLER.lGBT 50A. Installation Nr:Drawn : 26/04/95Sheet Nr : 1Diaqram Nr :1 HAMMOND & CHAMPNESS. 1 BETA DRIVE+IDELTA 2 LOGlC CONTROLLER.
Beta Drive Fuses.Fuses have been uprated and should be selected to suit the horsepower frcimthe chart below. E.g. Up to l0HP Motor a 20 awip fuse kvas fitted, now a 25amp fuse should be fi tted.BEFQREFu+Fuse10A20A32A40A50A63A80AHP5.5101520273545NQWFu+Fuse16A25A40A50A63ABOABOARP Precision Resistor.This resistor has a value of 0.068 ohms 25 watt, and is now complimentedby a larger resistor with a value of 0.034 ohms 50 watt. The following chartbelow will assist in the number of resistors to be programmed into Address10 on the Beta Drive Panel. It is essential that the correct number isprogrammed in according to HP.HP5.51 O1520273550Program atAD:10 nr.1122234
BETA DRIVE +....................................................i MA IN BOARD BG 1 1.........; CQY 80 ............ CQY 80 ............ CQY E,O \ - CC,NTACTOR L RELAY.3LN2803 IC8........................................(KT]) j s = CONTACTOR S RELAY.. .DIRECTIONAL ; de = -DOWN- RELAY.RELAY CONTROL. jRZ4 R35 ?36 mo = 'UP' RELAY.1 OK 10K I OK8Ei rn- r-( KA1 3 )-7 -( KC23 )hl........ ........ ......... m!K30) 8s (K20) : 7,...................... J ............... $, ........................ ..................... ... ............yi 65 i 8C BO K DE ,Ka] FFl COI 1 O\r INS GM GD +m+SEE 1.OSAFETY LANE 1) ihe input FREV can be used as 'Final Test Limit'. 'Nori Stop', 'Car Priority' or -Out of Service Activation'SWlTCH ON THE inputs by correctly programming Address 5d.ELECTRO- TO use inpui -FR€!- as -Final Test Limit- iriput (FREV), segments 3, 4 and 5 must be s ~ to t 3 (Address 5d).MECHANICAL TQ use inpur 'FREV' as -Non Stop- input (NS), segment 4 must be put to 1 and segments 3 and 5 put to OTERMINAL. (Address 5d).SPEEO GOVERNOR To use inpur "FREV' as -Car Priorlty' input (PRlC). segment 3 must be put to 1 and segments 4 and 5 put to OSWITCH. O-f (Addreâs 5d).To use input 'FREV' as -Out of Service Activation' inxt (MHS), segment 5 must be pirt to I and segments3 and 4 put to O (Address 56).PIT STOP SWITCIi.>IBUFFER S'MITCH. O-t, ....................................IIII IV: : SEE ' CONNECTING THE SAFETY i: : LANE BETWEEN 6s AND 10,3OWN FIt4P.L LIFIIT. C-f'-:' ACCORDING TO DOOR TYPE ' L:1' I-PAGES 14 AND 15. a:B:UP FItlPL LIMIT. C-t a ,4e:-....-.-.-..-.....--------A'3rnnIP31Zn. -1 OA--+ UP TEST LlMlT SEE CHAPTER 6.INPUT.AUTOMATIC DOORS
61 CONNECTING THE SAFETY LANE BETWEEN 1s AND 6E.THEORETICAL DIAGRAM:t.'Speed Oovernor Switch. O.SFinal Test Limit.Q6ETension Pit Pulley . O -Pit Stop Switch. 1-i. i.8uffer Switch. O -Down Final Limit. 0-%i.Up Final Limit. O -1IIHSPECTIOHI BOX. ILw----------------- --1iSafety OearSwitch.ON BOARDBG11.8uffe; Switch. Pit Stop ~witch. Tension Pit Speed OovernorPulley .Switch.: WHEN THE DELTA 2 LOGlC CONTROLLER IS NOT EQUIPPED WlTH AN N66 EXTENSION BOARD-0 BRIDGE THE SAFETY LANE ), 4s AND 6E MUST BE CONNECTED ON THE MAIN BOARD BG1 1.
71 CONNECTING THE SAFETY LANE BETWEEN 6 s AND 10,ACCORDING TO DOOR TYPE.IF MORETHAN ONEDOOR,CONNECT CONTACTS OFTHE SAHE TYPE IN SERIES.1) Lift without automatic door,manual doors on car & landings (flush shaft).DIAGRAM:MANUAL CAR /LANDING DOOR CONTACTS.INTERLOCKS.'h ----6sCONNECTION:k0 102) Lift with automatic car door,manual doors on landings.DIAGRAM:CAR DOORLANDING DOOR CONTACTS. CONTACT. INTERLOCKS.6.- - *-Lx, -.6 S 8E 8s 0INTERLOCKS.CAR DOORCONTACT.CONNECTION :0 10
3) Lift with autornatic car and landingdoors.DI AGRAM:CAR DOORCONTACTS.LANDING DOOR LOCKS AND CONTACTS.LANDlNG DOOR LOCKSAND CONTACTS.LEVEL OLEVEL NCONNECTION:1 CAR DOORCONTACT,4) Lift with automatic car door, manual doors onsome landings, automatic doors on others.DI AGRAM:MANUAL, CAR & LANDING DOOR CONTACTS.6 S 8 EAUTO MANUAL DOORCAR INTERLOCKS. AUTOMATIC LANDING DOOR LOCKS AND CONTACTS.CONTACT.i1.- -.-8s b ,CONNECTION:MANUAL DOORINTERLOCKS.AUTOCAR DOORCONTACT.>"EL O 1 LEVEL N 0 108s-A .MANUAL DOOR CONTACTS.8ELEVEL NLEVEL O1-1 1 1 OOOAUTOMATIC LANDING DOORLOCKS AND CONTACTS.
5) Lift with automatic car and landing doorsGAL MODHA.DIAGRAM:CAR DOOi?CONTACTMICROSW1IL4 lDOOR LOCKS6E 6sGMCACONNECTION:GSPC VIL14 l DLPREVERSINGHiCRO SWal-YBAL J ~ - - i r q - ~ ~7a;r Np 5;i "p DLPCOI l
6) Lift with automatic car and landing doorsGAL MODHA with type FM (fault monitor).D 1 AGRAM :DOOR LOCK CONTACTSBOTTOM INTERMEDIATE TOPCIRCUITS INSIDE DOTTED 80K ARE SUPPLIED 6YG A L AND LUCATED IN ELEVATOR MACHINE ROOMHEAVY LINES DENOTE FIELD WlRlNGr-------------_---------------- 1II1 SK OHM RESISTORS SUPPLIE['FOR 230 TO 30Ci VGC111IIMICRÜSWITCH INSIDE OPEHATOR MAKESJUST BEFORE GATE WlTCH IIAKEÇDLRV5431G Sl------------------ -----------------J/l FIS1 ).' ll\iÇ" COIqTACT LOCATED ON ELEVkTUR CONTROLLER CLOSED ON II.ISFECTIOIII OPEEAT1ONNEEDED FOR ANY OPERATION WHlCH REQUIRES THE CAR TO RLII\I WITH DOORS OPEN ANDGATE OR DOOR LOCKS INTEFITIOFIALLY BYFASSED. (ACCESS SWITCH OPERATION. ETC 1CONNECTION:IlII1FEQCIIREDGAL RELAY BOXLAIIIDING DOOR LOCKS.G>i DW>Oaa GS 17cia DFC- C '"'nWWVIDFM C)I NS7CÜNTACT.2 4HDR5 O! ---------------- JMOUI'ITED II'IMOTOR RUOM
BGl O BOARDI I
9) CONNECTING THE CAR DOOR MOTOR (STANDARD)If non-standard refer to last pages.1 1 THREE-PHASE MOTOR: Connect as shown below:Do not connect anythingto this terminal.2) THREE-PHASE motor using a single-phase supplywith dephasing capacitor. Connect as shown below.1 VDEPHASINGCAPACITOR.4A FUSES PLACEO TO THERlGHT ON THE ELECTRO-MECHANICAL TERMINALBLOCK.N.B. It is essential that the appropriate motor protection is fitted.The motor's protection from the povrer supply is ensured by fuses on theelictro-mechanical terminal block.I t is essential that al1 connection wires carrying more than 24V be inserted 1 7into the "HIGH VOLTAGE" travelling crible.
10) CONNECTING THE DOOR MOTOR BRAKE, AND INJECTION.1) Connecting the brake:This brake is intendeid to hlock the door at the end of each mcivernent.The standard version provides 48V13A supplij.To use this supplij for the brake, simply fix the strap betweeri +RD1and INJ, and conneict as shown below:FU5 1.6A.PROTECTION FORTHE l NJECTIONSUPPLY.DIM: 5 X 20.- N.B.YERY IMPORTANT !! !The tutal consumptiun of the 48Y SUPPLY FOR THE RETIRIHG RAMP,YALYES, etc. . . . must not exceed 3 Amps.A free vheeling 67255 diode (1 300v13A) must be fitted asclose as possible to the brake or injection coil.It is essential that al1 cunnection vires carrying more than 24vbe inserted into the 'HlGH VOLTAGE' travelling cable.
DI SPLAI1ED ONDIGITALINDICATORCODE TO BE PROGRAMMEDINTO THE CONTROLLERROGRAMNE THE CODE T
Connect "AtlMUon the arrow to "24R" on the controller.Connect "COM" on the srrow to "0'4" on the controller.Connect "€3" on the arrow to "FM" on the controller.Connect "El" on the arrow to "FD" on the controller."E3" and "E4" on the FL30 and FL50 are never usedNOTE: To get the arrow scrolling when the car is moving,you have to programme at addresç 08 segment 5 on.
H0?1. TO CONNECT TNE HiP,iNJICATOûCl alx,2 in'." IUww,&,ND IL.2u~ I C I T A Iviui nLB L IIi aUT!o?OR 1 1CONTROLLER /iIIl'>ArtL YKIDY ICPEF'l1 IIliCsnnect 'ALIM' on the digi ta1 indicafor to '24R' on the controller.Connect 'COFI' on the digital indicatcir to 'OV' on the cmtroiler.With an 1030 connect '€3' to 'CREP' on the controiier.With an 1050 connect 'E 1' to 'CREP' on the controller.El, E2, E4 on the ID30 are never use&E2 on the ID50 is never used.
l- II I Ii-I1I ll~ f - J ~ f = J ~ oooooi ~if-Jf-J~fJ~~liioo00 OoOoG1 /@oo(3a/lu,l%!==!JIE2 !CF0 IQQQQQ OOQOQ I IQOOOQI0000,g, 00000' 00000 E4iCFMi l iFD 'O 1 -1~JOOOO ~J@Q(-J~ f~000f~E3/Fr-1 @OOOQO 000001OOOOQ~1 I~oOOOO oooo,cJ ioooos I1 i' 1 II IPi1 l !- 1 I lI i1I AUTINOR 1 1II i1 CONTRCII 1 Ff? l !I !----I I I l I1 CREF.l l IIII I1 FM 1 1 / IF DIIConnect 'ALIM/24R' on the digital inciicaior ta '24R' on the controiler.Connect 'COM/OV' on the digital indicator to 'OV' on the controller-Conneet 'ESICREP' on the digital indicator to 'CREP' on the controller-Connect 'E 1 /FD' on the digital indicator to 'FD' on the controller.Connect 'E3lFîî' on the digital inciicator to 'FR' on the controller-'EL3/CCREP', 'E2/CFD', 'E4/CFN', on the IDFL30 and IDFL50 are neverused-NOTE: To get the arrow scrolling when the car is mouing, you have toprogramme at address 08 segment 5 on-
NEW SCROLLING INDICATORS PROGRAMMING SHEET :Note :These codes are used with Versions 6 and upwards of the program.Addresses are the same for normal digital indicators.Addrs : 28,29 - 2F
CONNECTORS FOR CONNECTING UP THE IDFL30 OR IDFLSOASSEMBLED ONTO A SCHAFER TYPE PLASTRONE2 / POSYEl / 24RCONNECTORS USED FOR CONNECTING UPTHE IDFL30 OR IDFLSO ON THE FRONT FACE.AF19BOARDCONNECTING IDFL30 OR IDFLSO ONTO AUTINOR EQUIPMENT1. DIRECTION ARROWS: 24R OVER ALlMOV OVER COMCREP OVER E3NO CONNECTIONS IN E4NO CONNECTIONS IN El AND E2COMMON CREP AND COM LINKSMADE BY THE SHUNT SWI.sw2 SHUNT SW2 IN POSITION 2 AND 3.FOR LEVEL PRESENCE SIMULATION.2. NEXT DEPARTURE ARROWS: 24R OVER ALlMOV OVER COMCREP OVER E324R OVER ElPOSX OVER E2. COMMON CCREP AND COM LINKSLm 5W1MADE BY THE SHUNT SW1.;g 5w2SHUNT SW2 IN POSITION 1 AND 2.
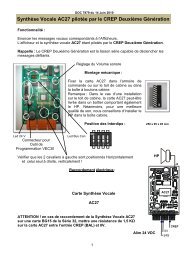
AUTINORSPEECH SYNTHESISERSelection of Inputs Down for Nat Used.and voltage from Serial Modedry contacts. (CREP)Note:The selection of switches 1, 2 & 4 determines the way in which the speech synthesiser operates.To select Serial mode as sketch, Sw2 should be put in the Down position, Swl should be in the Down positionand Sw4 should be in the left-hand position to select the use of OV with normally open inputs. Crep is wired toterminal 1 which controls the Floor designations after the Gong signal is given at terminal 6. Terminals 2 - 5should be fed OV via dry contacts to select requested messages. This configuration is used with Delta 1 & 2 systemusing Crep Input.When adding the Speech Synthesiser Board to an existing Delta 1 or 2 system, a Gong relay interface willbe required and whatever messages are required, interfacing maybe required if not already available.See Page 2. for Switch Configuration when using individual inputs for floor designationsSPECIALNOTE: IfJumpers areused insteadof switches,the positionofjumpers are contrary to thatshown on the SYNO8 board. In the majority of cases, al1 SYNO8 boards will be configuredto operate one wire per floor. See page 49i.
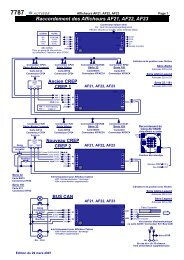
AUTINORSPEECH SYNTHESISERPOSITIVE LOGICDRY CONTACT. OVMESSAGE 14NEGATIVE LOGICDRY CONTACT. 24V7MESSAGE11POSITIVE LOGICDRY CONTACT. OVMESSAGE 10NEGATIVE LOGICMESSAGE 9 7 DRY CONTACT .24V 1>MESSAGE 8MESSAGE 7>MESSAGE 6MESSAGE 5>MESSAGE 4MICROMESSAGE 37810)MESSAGE 2Input only24VALIDATIONMESS 15MESS 14MESS 13MESS 12MESS 11MESS 10MESS 9MESS 8MESS 7MESS 6MESS 5MESS 4MESS 3MESS 2MESS 1MESS ObGONGISelection of Inputsand voltage fromdry contacts.Paraiiel Mode.Not Used.The selection of switches 1,2 & 4 determines the way in which the speech synthesiser operates.Note: This eonf~guration is used for individual inputs :a) when a Delta 1 Controiier is used , using the position indicator OV output from N.ll board.b) when a Delta 2 Controiier is used , using the position indicator OV output from BG.14 board.1). SW2 should be put in the up position, with SW1 in the Down position and SW4 should be inthe left-hand position to select the input of OV witli normally open contacts. This configurationis used both for Autinor as above (a. and b.) and Non-Autinor control systems.2). SW2 should be put in the down position, with SWl in the up position and SW4 should bein the right-hand position to select the input of 24V with normally closed contacts.3). SW2 should be put in the up position, with SW1 in the Down position and SW4 should bein the right-hand position to select the input 24V with normally open contacts.4). SW2 should be put in the down position, with SW1 in the Up position and SW4 should be inthe right-hand position to select the 24V input with normally closed contacts.Note On Autinor systems,Validation is done by a OV input via the Gong relay contact as diagram above.On Non-Autinor systems, Validation will depend on whether OV or 24V is used to select individualfloor designation and how Validation is triggered. If in doubt consult S&R EDO.SPECIALNOTE: If Jumpers are used instead of switches, the position of jumpers are contrary to thatshown on the SYNOS board.
PAR ADDRESS 40: Beçt displayed in the segment mode.At this address one cen program the parameters of door 1-SEGMENT 7: RGPT Specific to Belgium.Program segment 7 ta be OFFSEGMENT 6: DFC ( Door Force when Closed ? )If one programs this segment ON, the logic panel will provide a doorclose signal even if the closed limit has been reached but S has not beenestablished. This option can be useful if the closed limit switch isbroken a short moment before the car gate switch closes. When the dooris closing and the close limi t is reached, the door close signal willcontinue until 8 has been reached.Programming this segment OFF disables this function.NOTE: If there is no cal1 present the door will stop on the close limit-. Ifthere is a cal1 the door close signal will be given until 8 is made.SEGMENT 5: DOR1 OL ( DOoR 1 Without Open Limit ? )If one programs this segment ON, the logic panel operates door 1 inthe open direction without looking for a door open limi t.If one programs this segment OFF, then the logic panel expects to seea door open limit when operating door 1.SEGMENT 4: DORI CL ( DOoR 1 Without Closed Limit ? )If one programs this segment ON, the logic panel operates Door 1 inthe close direction wi thout looking for a door clased limit.If one programs this segment OFF, thé logic panel expects to see adoor closed limit when operating door 1.SEGMENT 3: DOR 1 EXT ( DOoR 1 EXTended Close Time ? )If one programs this segment ON, the logic panel maintains the doorclose signal an additionai 300 rns after the closed limit has beenreached.Programmi ng thi s segment OFF di sabl es thi s f uncti on.SEGMENT 2: DOR1 CF ( DOoR 1 Closing Force When Moving ? )If one programs this segment ON, the logic panel gives a door closesignal while the car is rnoving.If this segment is programmed OFF, this function is disabled.
SEGMENT 1 : DOR 1 DR ( DOoR 1 DRift O.K. ? )If one progrsms this segment ON and door 1 does not have a closedlimit, the logic panel will provide a close signal until 8 is established.If the door drifts open and 8 is broken, the Yoor clclse signal is MOTgiven again. On1 y i f a cal1 is made, is the door close signal given.If this segment is programmed OFF, this function is disabled.SEGMENT O: DOR 1PÇ ( DOoR 1 Permanent Signal ? )If one programs this segment ON, the door 1 open or close signal ismaintained even i f the open or closed limi t has been reached.If this segment is programmed OFF, this function is disabled.PAR ADDRESÇ 41: DQRITIH (DOoR 1 Tlfling?)Best displayed in the digit mode.At this address one can program the timing of door 1.If the door hss a door open limit then this is the time the door staysopen when the limit is reached.If the door does not have a door open limit then the time starts as soonas the door open signal is given.The time is ad justable from 2-255 seconds (uni ts are in seconds) and isprogrammed in Hexidecimal. Consul t the table on page 74 for nec. to Hex.conversi on.PAR ADDRESS 42: DQR 1 ROT ( DOoR 1 Re-Open Time ? )Best displayed in the digit mode.At this address one programs the time the daor stays open when a reopensignal has been given i.e. door open button, safety edge, photo eye,e.t.c. . .The time 1s adjustable from 1-255 seconds (uni ts are in seconds) and isprogrammed in Hexidecimal. Consult the table on page 34 for Dec. to Hex.conversi on.PAR ADDRESS 43: OSFLR ( Out of Service FLooR ? )Best displayed in the digit mode.At this eddress one programs the floor where the car parks, when it isplaced out of service by input MHS.
PAR ADDRESS 44: DOR 1ROD (DOoR 1 Re-Open Delay]Best displayed in the digit mode.At this address one programs the desired time delay between reversingthe direction of the door movement when re-opening. This may benecessary if the inertia of the door is high.Time is adjustable between 10 ms - 2.55 seconds. Values are entered ini ncrements of 1 0ms.For examph If a time of 500ms is desired then this would correspondto 50 x10 ms. Consulting Page 34 this equals 32 Hexidecimal, so thevalue programmed would be 32.PAR ADDRESS 45: FlLT8 ( FlLTering of 8 ? 1Best displayed in the digit mode.At this address one can program the time allowed for contact bounce ofthe car gate switch ( input 8 ).Time is adjustable between 10 ms - 2.55 seconds. Values are entered inincrements of 1 0ms.For examph If a time of 500ms is desired then thi s would correspondto 50 x 10 ms. Consul ti ng Page 34 thi s equal s 32 Hexi deci mal, so thevalue programmed would be 32.PAR ADDRESS 46: TIM 8-10 (MaximumTlMe between8and IO?)Best displayed in the digit mode.At this address one can program the maximum time allowed betweeninputs 8 and 10 when a cal1 has been placed. With automatic doors thistime will typically be very small.Time is adjustable between 3-255 seconds. Values are entered inseconds.PAR ADDRESS 47: DOR 1MOT ( DOoR 1 Maximum Operating Time ? 1At this address one programs the maximum time allowed for operatingdoor 1 between the open and closed limits. If this time is exceededwhile operating the door, a fault is indicated.If this function is not desired then one can program 00.
PAR ADDRESS 48: Best displayed in the segment mode.At this address door 1 options for level O are programmed.SEGMENT 7: RRD ( Retiring Ramp Delay ? )If segment 7 is programmed ON there is a delay when arriving at thelevel before the retiring ramp is de-energised. This delay allows carswith an automatic door enough time to open before the hall door can beopened. For this function to work segment 4 must be programmed ON.If segment 7 is programmed ON and segment 4 is OFF then the retiringramp is de-energised a short time before the door open signal is given.This option may be desirable if there are automatic doors with aretiring ramp.If segment 7 is programmed OFF then these options are disabled.SEGMENT 6: Not used,SEGMENT 5: Not used,SEGMENT 4: D 1 A+SD ( Door 1 Automatic + Swing Door ? 1If segment 4 is programmed ON then this indicates to the logic panelthat there is an automatic car door, controlled from the controller, anda manual swing door at this level.If segment 4 is programmed OFF then this indicates to the logic panelthat there are fully automatic doors at level O.SEGMENT 3: POD 1LO ( Pre-Opening Door 1 at Level O ?If segment 3 is programmed ON then door 1 will pre-open at this level .Note that this works in conjunction wi th the parameters programmed ataddress 63 and that the pre-opening board N66 must be used.If segment 3 is programmed OFF then the door will not pre-open.SEGMENT 2: PDlOPLQ ( Parking Door 1 with Open Doors Level O ? 1If segment 2 is programmed ON then the car parks with door 1 open atthis level,If segment 2 is programmed OFF then the car parks with door 1 closed,SEGMENT 1 : D 101 ( Door 1 Opening l nhibit 1If segment 1 is programmed ON then door 1 is not allowed to open atthis level.If segment 1 is programmed OFF then door 1 is allowed to open at thislevel .SEGMENT O: NOT USED.
PAR ADDRESS 49: Best displayed in the segment mode.At this address door 1 options for level 1 are programmed.SEGMENT 7: RRD ( Retiring Ramp Delay ? 1If segment 7 is programmed ON there is a delay when arriving at thelevel before the retiring ramp is de-energised, This delay allows carswith an automatic door enough time to open before the hall door can beopened. For this function to work segment 4 must be programmed ON.If segment 7 is programmed ON and segment 4 is OFF then the retiringramp is de-energised a short time before the door open signal is given.This option may be desirable if there are automatic doors with aretiring ramp.If segment 7 is programmed OFF then these options are disabled.SEGMENT 6: Nat used.SEGMENT 5: Nat used.SEGMENT 4: Dl A+SD (, Door 1 Automatic + Swing Door ? 1If segment 4 is programmed ON then this indicates to the logic panelthat there is an automatic car door, controlled from the controller, anda manual swing door at this level.If segment 4 is programmed OFF then this indicates to the logic panelthat there are fully automatic doors at level 1.SEGMENT 3: POD IL1 I, Pre-Opening Door 1 at Level 1 ? 1If segment 3 is programmed ON then door 1 will pre-open at this level.Note that this works in conjunction with the parameters programmed ataddress 63 and that the pre-opening board N66 must be used.If segment 3 is programmed OFF then the door will not pre-open,SEGMENT 2: PD 1 OPLI (, Parking Door 1 with Open Doors Level 1 ? 1If segment 2 is programmed ON then the car parks with door 1 open atthis level-If segment 2 is programmed OFF then the car parks with door1 clased.SEGMENT 1 : D 1 O1I, Door 1 Opening l nhibitIf segment 1 is programmed ON then door 1 is not allowed ta open atthis level. If segment 1 is programmed OFF then door 1 is allowed toopen at this leve\.SEGMENT O: NOT USED.54
PAR ADDRESS 4A: Door 1 Level 2. Same as Address 48 for Level 2.PAR ADDRESS 4B: Door 1 Level 3. Same as Address 48 for Level 3.PAR ADDRESS 4C: Door 1 Level 4, Same as Address 48 for Level 4.PAR ADDRESS 4D: Door 1 Level 5, Same as Address 48 for Level 5.PAR ADDRESS 4E: Door 1 Level 6. Same as Address 48 for Level 6 ,PAR ADDRESS 4F: Door 1 Level 7, Same as Address 48 for level 7.PAR ADDRESS 5C: Best displayed in segment mode.SEGMENT 7: FULCOL ( FULl COLlective ? 1If segment 7 is programmed ON, the logicfull collective controller ,panel is programmed as aSEGMENT 6: DOWCOL ( DOWn COLlective ? 1If segment 6 is programmed ON then logicdown collective controller .panel is programmed as anSEGMENT 5: Not used.SEGMENT 4: 8612 ( 6612 Board ?Program segment 4 ON, when you wish to use the BG12 BoardSEGMENT 3: Not used.SEGMENT 2: BG 13 ( 8613 Board ? 1Program segment 2 ON, when you wish to use the 8613 Board,SEGMENT 1 : Not used.SEGMENT O:Not used.
PAR ADDRESS 5D: Best displayed in segment mode.SEGMENT 5, 4 & 3:The input FREV car] be used as "Non Stop"', "Goods Control" or "Outof Service Activation" inputs hy correct1 y programming Address 5d.To use FREV as "Non Stop" (NS), segment 3 must be put to 1 andsegment-s 4 and 5 t o O (Address 56).To use FREV as "Goods Control" (PRIC), segment 4 muvt be put t o 1and segmerits 3 and 5 tu O (Address 56).To use FREV as "Out of Service Activation" (MHS), segment 5 mustbe put to 1 and segments 3 and 4 to O (Address 5d).SEGMENT 2, 1 & O:The input SU can be used as "Overload", "Non Stop", "Car Priority"or "Out of Service Activation" inputs by correctly programmingAddress 5d.To use SU as "Overload" (SU), segments O, 1 and 2 must be put to O(Address 5d).To use SU as "Non Stop" (NS), segment O must be put to 1 andsegwierits 1 and 2 to O (Address 56).To use SU as "Car Priority" (PRIC), segment 1 must be put tu 1 andsegments O an6 2 to O (Address 56).To use SU as "Out of Service Activation" (MHS), segment 2 must beput to 1 and segments O and 1 t o O (Address 5d).PAR ADDRESS 60: Best displayed in the segment mode.At this address one can program the parameters of door 2.SEGMENT 7: RGPT Specif ic tu Belgium.Program segment 7 tu be OFF.SEGMENT 6: DFC ( Door Force when ClosedIf one programs this segment ON, the logic panel will provide a doorclose signal even if the closed limit has been reached but 8 has not beenestablished. This option can be useful if the closed limit switch ishroken a short moment before t-he car gate switch closes.Programwiing this segrnent OFF disatil es this function.NOTE: If there is no call present the door will stop on the close limit. Ifthere is a call the door close signal will be given until 8 is made.
NOTE: If there is no call present the door will stop on the close limi t. Ifthere is a cal1 the door close signal will be given until 8 is made.SEGMENT 5: DOR2OL (DoOR 2 Without Open Limit?)If one programs this segment ON, the logic panel operates door 2 inthe open direction wi thout looking for s door open limit.If one programs this segment OFF, then the logic panel expects to seea door open limit when operation door 2.SEGMENT 4: DOR2CL (DoOR 2 Without Closed Limit?)If one programs this segment ON, the logic panel operstes door 2 inthe close direction without looking for a door close limit.If one programs thiç segment OFF, the Iogic panel expects to çee sdoor closed limi t when operating door 2.SEGMENT 3: DOR2EXT ( DQoR 2 EXTended Close Time?)If one programs this segment ON, the 1 ogic panel maintains the doorclose signal an sdditional 300 ms sfter the closed limit has beenreached.Programming this segment OFF disables this function.SEGMENT 2: DOR2CF ( DOoR 2 Closing Force When Moving? )If one programs this segment ON, the logic panel gives a door closesignal white the car is moving.If this segment is programmed OFF, this function is disabled.ÇEGMENT 1: DOR2DR ( DOoR 2 DRift O.K.? )If one programs this segment ON and door 2 does not have a closédlimit, the logic panel will provide a close signal until 8 is established.If the door drifts open and 8 is broken, the door close signal is NQTgiven again. If a call is mede, the door close signal is given.If this segment is programmed OFF, this function is disabled.SEGMENT O: DOR2PS ( DQoR 2 Permanent Signal? )If one programs this segment ON, the door 2 open or close signal ismaintained even if the open or closed limit has been reached.If this segment is programmed OFF, thiç function is disabled.
PAR ADDRESS 6 1: D2T (Door 2 Timing)Best displayed in the digit mode.At this address one can program the timing of door 2.If the door has a door open limit then this is the time the door staysopen when the limit is reached.If the door does not have a door open limit then the time starts as soonas the door open signal is given.The time is adjustabl e from 2-255 seconds (uni ts are in seconds) and isprogrammed in Hexidecimal. Consult the table on page 34 for Dec. t o Hex.conversion.PAR ADDRESS 62: DOR2ROT (DOoR 2 Re-Open Time)Best displayed in the digit mode.At this address one programs the time the door stays open when a reopensignal has been given i.e. door open button, safety edge, photo eye,e.t.c. . .Valid times are adjustable from 1-255 seconds.Values are in Hexidecimal Format i.e. O-FF HSee page 34 for Hexi deci mal conversi on chart.PAR ADDRESS 63: Best displayed in the segment mode.SEGMENT 7: EMPCAR ( EMPty CAR ? )If segment 7 is programmed ON, then i f after 3 car calls the photo eyebeam ( input CS ) has not been broken, al1 car calls are cancelled.If segment 7 is programmed OFF then this function is disabled.SEGMENT 6: NUDGING C NUDGING ? )If segment 6 is programmed ON, then after a preset time (programmedat address 63) of the photo eye being blocked (input CS), the door can beclosed on nudging wi th the help of output INH 1 and a pilot relay. Notethat only input CS is ignored, input COI remains active.If segment 6 is OFF then this option is disabled.SEGMENT 5: RE-LEV ( RE-LEVelling ? )Programming segment 5 ON enables the re-levelling option;Programming segment 5 OFF disables the re-levelling option.
SEGMENT 4: BDRIVE ( 5ETA DR1 VE ? )If the 5ETA DRlVE VVVF is used with the Delta 2 logic panel thenthis segment must be programmed OH, otherwise i t is OFF.SEGMENT 3: Not used.SEGiMENT 2: SPEEDC ( SPEED Cctntrol ? fIf a speed control other thsn the BETA DRIVE is being used and theoptional interface board Na5 is required, segment 2 must beprogrsmmed OH. Otherwisg this segment is OFF.SEGMENT 1: PRE-OP ( PRE-QPening ? )If pre-opening is desired then segment 1 must be programmed ON. Notethat pre-opening must aiso be specified for each floor and for esch doorof the lift.If no pre-opening is wanted then program OFF.SEGMENT O: DTÇ ( Door Time Factor )If segment O is programmed ON, the door time associated wi th eiddress41 and 6 1 has a factor of 2.5.If programmed OFF, this time has a factor of 1.PAR ADDRESS 643 DOR2ROD (DOoR 2 Re-Open Delay)Best displayed in the digit mode.At this address one programs the desired t-ime delay between reversingthe direction of the door movement whe re-opening. This may benecessary if the inertia of the door is high.Time is adjustable between 10 ms - 2.55 seconds. Values are entered inincrements of 1Oms.For example: If a time of 500ms is desired then this would correspondto 50% 10 ms. Consul ting Page 34 this equals 32 Hexiclecirnal,so the value programmed would be 32.PAR ADDRESS 65: Not used.PAR ADDRESS 66: Not used.
PAR ADDREÇS 67: DOR2MOT (DOoR 2 Maximum Qperating Time)At this address one programs the maximum time allowed for operatingdoor 2 between the open and closed limits. If this time is exceededwhile operating the door, a faul t 1s indicated.If this function is not desired the one can program 00.PAR ADDREÇS 68: Best displayed in the segment mode.At this address door 2 options for level O are programrned.SEGMENT 7:RRD (Retiring Ramp Delay)If segment 7 is programmed ON there is a deley when arriving at thelevel before the retiring ramp is de-energised. This delay allows carswith an automatic door time enough time to open before the hall doorcan be opened. For this function to work segment 4 must be programmedON.If segment 7 is programmed ON and segment 4 is OFF then the retiringramp is de-energiçed a short time bef ore the door open signal is given.This option may be desireable if there are automatic doors with aretiring ramp.If segment 7 is programmed OFF then these options are disabled.SEGMENT 6: Not uséd.ÇEGHENT 5: Not used.SEGMENT 4: DâA+SD ( Door 2 Automatic + Swing Door ? )If segment 4 is programmed ON then this indicates to the logic panelthat there is an automatic car daor, controlled from the controller, anda manual swing door at this level.If segment 4 is programmed OFF then this indicates to the logic panelthat there are fully automatic doors at this level.SEGMENT 3: POD2LO ( Pre-Opening Door 2 at Level O ? )If segment 3 is programmed ON then door 2 will pre-open at this level.Note that this works in conjunction wi th the parameters programmed ataddress 63 and that the pre-opening board N66 must be used.If segment 3 is progrgimmed OFF then the daor will not pre-open.
SEGMENT 2: PD2OPLO ( Parking Door 2 with Open doors at Level O ? 1If segment 2 is programmed ON then the car parks with door 2 open atthis level,If segment 2 is programmed OFF then the car parks with door 2 closed,SEGMENT 1 : D201 ( Door 2 Opening l nhibit ? 1If segment 1 is programmed ON then door 2 is not allowed to open atthis level.If segment 1 is programmed OFF then door 2 is allowed to open at thislevel .SEGMENT O:NOT USED.PAR ADDREÇS 69:Best displayed in the segment mode.At this address door 2 options for level 1 are programmed.SEGMENT 7: RRD ( Retiring Ramp Delay ? 1If segment 7 is programmed ON there is a delay when arriving at thelevel before the retiring ramp is de-energised. This delay allows carswith an automatic door enough time to open before the hall door can beopened. For this function to work segment 4 must be programmed ON.If segment 7 is programmed ON and segment 4 is OFF then the retiringramp is de-energised a short time before the door open signal is given,This option may be desirable if there are automatic doors with aretiring ramp,If segment 7 is programmed OFF then these options are disabled.SEGMENT 6: Not used.SEGMENT 5: Not used.SEGMENT 4: D2A+SD C Door 2 Automatic + Swing Door ? 1If segment 4 is programmed ON then this indicates to the logic panelthat there is an automatic car door, controlled from the controller, anda manual swing door at this level.If segment 4 is programmed OFF then this indicates to the logicthat there are fully automatic doors at level 1,panel
SEGMENT 3: POD2L 1 ( Pre-Opening Door 2 at Level 1 ? 3If segment 3 is programmed ON then door 2 will pre-open at this level.Note that this works in conjunction with the parameters programmed ataddress 63 and that the pre-opening board N66 must be used.If segment 3 is programmed OFF then the door will not pre-open.SEGMENT 2: PD2OPL1 C Parking Door 2 with Open Doors Level 1 ? 1If segment 2 is programmed ON then the car parks with door 2 open atthis level.If segment 2 is programmed OFF then the car parks with door 2 closed.SEGMENT 1 : D201 ( Door 2 Opening 1 nhibit 1If segment 1 is programmed ON then door 2 is not allowed to open atthis level.If segment 1 is programmed OFF then door 2 is allowed to open at thislevel .SEGMENT O:NOT USED.PAR ADDRESS 6A: Door 2 Level 2. Same as Address 68 for Level 2.PAR ADDRESS 66: Door 2 Level 3. Same as Address 68 for Level 3.PAR ADDRESS 6C: Door 2 Level 4. Same as Address 68 for Level 4,PAR ADDRESS 6D: Door 2 Level 5. Same as Address 68 for Level 5.PAR ADDRESS 6E: Door 2 Level 6. Same as Address 68 for Level 6.PAR ADDRESS 6F: Door 2 Level 7. Same as Address 68 for level 7.PAR ADDRESS 7E: FCBO IFault Code Before OldestlBest displayed in the digit mode.At this address one can read the fault code before the oldest.PAR ADDRESS 7F: OFC IOldest Fault Code)Best displayed iri the digit mode.At this address one can read the oldest fault code to have occured in thesystem.
Definition of the " BETA DRIVE " parametersby increasing addresses.Al1 the parameters are programmed in decimsl digits.ADDREÇÇ VO C04b):S~eed QO.At this address, the levellirag speed i s programmed-The frequency applicable for V0 is between 2 and 6 Hertz inclusive.The programming unit is in Hertz-VO cannot exceed the speed of 0,30 mls without the BETA DRIVEdisplaying fault code 84 and stopping on the brske.ADDREÇS VI (01 1:S~eed V 1.At this address, the interrnedjate or inspection speed isprogrammed,The applicable frequency for V 1 is between 7 and 40 Hertz inclusive.The programming unit iç in Hertz. V 1 cannat exceed the speed of 0,63mts wi thout the BETA DRIVE diçplaying fâul t code 83.ADDRESÇ V2 f02):S~eed V2.At this address, one programs the fast speed.The applicable frequency for V2 iç between Vl+t and 60 Hertzinclusive. The pragramming unit is in Hertz.ADDRESS Vn C03:Nominal Ç~eed.At this address, one programs the nominal speed which servesas overspeed control and regulatian.In fact, if the real speed attains the programmed speed Vn + 20%, thesystem ceases ta operate and the pemanant errar cade 82 is displayedon the communication device.The programming unit is decimetres per second ( 0,l mis].This value programmed also limi ts the speed to this maximum. In thisway it is possible to maintain the same speed up and down.ADDRESS Pt (04):Slo~e.At this address, one programs the deceleration slope.This value is between 19 and 05. 05 corresponds ta the longest orsmoothest slope. 19 corresponds to the shortest or roughest slope.Not al1 the slopes are useful for al1 the speeds the table on page26, advises us ta choose the slope in conjunction with the programmednominal speed.
ADDRESS Ac (05):Accelerrition.At this address, the time to attain 50 Hertz is programmed.The value is between 2 and 9,9 seconds.The programming unit is seconds.ADDRESÇ St (06):Stabilisation.At this address, the rotor stabilisation time before thedropping of the brake is programmed.The value is included between 300 and 700 milliseconds.The programming is done in i ncrements of 10 mi 1 liseconds.ADDRESS ÇF [O?):Stabilisation of the brake.At this address, one programs the time during which the rotoris stabilised so that the brake has time to release beforestarting-The value is included between 0 and 600 milliseconds.The programming is done in increments of 10 milliseconds.ADDRESS tt I08):Motor Toraue.At this address, the motor torque can be adjusted at lowfrequencies by setting a value between 0 and 9-The value 9 corresponds to the highest torque .ADDRESS th (091: Overload Current.At this address, one programs the maximum supply current tothe motor, if exceeded the permenant error code 8 1 is shown.Program the value corresponding ta the motor power by referring ta thetable below ( valid for 3 x 400V only ! 1.Check that the number of 0,068Q Precision Resistors has beenprogrammed at address 10 (nr): NOTE:BETA DRlVE 25A : nr = 0 1, BETA DRIVE 50A : nr = 0 1,BETA DRIVE 75A : nr = 02, BETA DRIVE 100A : nr = 02and BETA DRIVE 150A : nr = 03.
ADDREÇS IG (OA):Integrator.At this address, the timing of the movement supervision isprogrammed.The value is betweeri 0,l and 9,9 seconds.The prcigrarnrnirig is dorie iri incrernents of 0,l seconds.By programming 00, the BETA DRIVE rnovement superviçion isinhi bited.ADDRESS td (OB):lni tial Acceleration.Units are in 1/10 of a second.At this address, we program the initial acceleration.The programmable value varies between 00 and 50.00 corresponds to a gentle start.50 corresponds to a sharper start.ADDRESS hd (OE):Hardware.SEGMENT 7: NOT USED.SEGMENT 6: TFAULT ( Temperature FAULT at 70°C ? )Program segment 6 ON, when you wish the radiator temperaturedetection threshold to increase f rom 60°C to 70°C.SEGMENT 5:Program segmerit 5 ON to activate autamatic levelling torque, whichshould be programmed at address 14, according tu instructions given onpages 668 and 66b.Program segment 5 OFF i f i t i s riot desired.Depending on H.P., levelling torque may not be required.ÇEGMENT 4: NOT USED.ÇEGMENT 3:Program segment 3 ON to activate sutomstic up and duwri startingtorque, which should be programmed at address 11 (UT) and address 13(DT); accordirig tu instructions given on pages 66a and 66h.SEGMENT 2: SLAREL ( SLAve RELay ? )Program segment 2 ON, when the contactors L arid S are relayed.Program segment 2 OFF, when they are not relayed.
SEGMENT 1: OMDO7 ( ONDO7 Board ? )Program segment 1 ON, when you wish to use the ONDO7 hoard. Thisboard enables orle tu ubtain an intermediate speed different to theinspection speed, as well as a levellitig speed different to VO.lt also allows the use of a t-elay t-hat chatters wheri an overload isdetected by the BETA DRIVE.SEGMENT O:Program segment O ON, when you wish to inhibit the inspection of theRecuperati on Transistor.ADDRESS dQ (OF):Deqree.At this address, the Factory programs the calibration of thetemperature sensor.The programming unit is degrees celcius.ADDRESS nr (1 0):The Number of Resistors.At this address, the Factory will prograrn the number of 0,0688Precisiori Resistors instal led it-I the BETA DR1 VE:SEE PAGE 1 UA.
BETA Drive & MLlft for DELTA Version MLI.0B AND ML1.09.BETA Drive system wi th 003 twin beam head unit.Register address number 10This address allows the progrsmming of the number of shunt resistors used forthe current feedback. The parameter TH is pragrammed in Amps.The motor current, when read out from the display, is also given in Amps.Contra1 Parameters.The programme now controls the ratio between the lift speed and thedeceleration curve profiles. If the choice of deceleration profile does notcorrespond with the table below, with respect ta the lift speed, the fault 98will be generated.SPEED0.1 misO. 2 m is0.3mis0.4mis0.5mis0.6mtsO.7misO.8misO.9mis1 .OmisDECELERATION YALUE (PT)12,14,16,1912,14,16,1912,14,16,1912,14,16,1911,12,14,1610,l 1,12,141O,1 1,12,14O9,10,1 1,12O9,10,1 1,12O8,09,1 O, 1 1SPEED1 .lm!$1 .Zmh1.3mis1.4mi~1.5mis1.6mts1.7mis1.8mis1.9mis2.Omi~DECELERATION YALUE (PT)OO7,08,09,107,08,09,1 O06,07,08,09O6,07,08,0905,06,07,0505,06,07,08O5,06,07,0805,06,07,0705,06,07,0705,O6,Ob,O?The program controls the parameter VI and the way in which the systemoperates when on test with respect to the value Vn. The speed of V 1 is notallowed to be greater than 0.6 m#s.The cantrol of the levelling speed is now refined into increments of 1 # 16th Hzinstead of the previous 1 #4 Hz. This applies tu the situation where the speed isautomatically increased or decreased due to load conditions.Detection of Fault Code number 86.Fault 86 will be allowed to be generated 3 times before the system locks out. Inother words 3 attempts to start will be made before the lock-out condition isobserved.At the time of detecting fault 86, the MLlft controller will not interrupt thesafety çhain (dropping MO or DE). In this event fault 86 would be converted tofaul t 52 (Loss of safety line].-Registering of HARDWARE at address 0Eh.SEGMENT 7 6 5 4 3L 310HARDWARE OP22OY DEFT70 OPATTYOPTTTY CONREL CARTDP CTRREC-NOTE: Segment 3 MUST BE SET ON to activate autamatic stepping af TT.
- Option of variable TT.At hardware address OEh ensure Segment 3 is OFF before setti nq up the standard TT at address 08.Setti ng of Parameters in order of preference.1ParameterMTCi TETATTTAddress11H12H1 3H14H08HTTTheminirnumtorqueforanUPemptycar.TT The minimum torque for a Dû'V4N enipty car.Setting the tinie slices in which TT automaticall y increments 400ms.TTThernir~irriumtorquetakenatYOspeed.Initial setti ng of maximum torque + 1 for balanced* empty car down.Add ress 08 H TT.The initial setting of maximum torque for balanced* empty car down should be done bq setting TT to 00and increasing until the lift moves off comfurtably. Then add 1 point for safety.Now set Segment 3 ON at address OEh.Address 1 3H ET.A setti ng of 3 at this Address sets the time slices in which TT automaticall y increments every 40Dms.This setting represents the number of impulses required to be seen on the slot count otherwise thetorque will be i ncreased.Addrevs 12H DT.With the red switch on m, select Address 90 and run the lift down. Observe the reading on the displaywhich corresponds to the amount of torque required to drive the lift down. Enter this value in Address12h.Address 11 H MT.With the red switch on m, select Address 90 and run the lift up. Observe the reading on the display- --which corresponds to the minimum torque required to drive the lift up. Enter this value in Address 11 h.Add ress 1 4h AT. This Address is un1 ya~plicable ta Version 09 Progrsm or above.This address indicates the minimum automatic TT (torque) to be taken by the lift to run at VO speed. Ifthe lift starts off at a certain torque and on slowi ng down and reeçhing SD speed, the torque found atAddress 14 will be used if the value at ADDR 14is bigger or equal to the starting Torque. If the value atADDR 14is smaller than the Torque chosen at the start, the lift will continue to run on VO at the sameTorque. E.y. Set the value of ADDR 14 to 1 point higher than that set at ADDR 11.This address is affected by the setting of segment US ON at address OEh (hd). 00 NUT USE UNLESSREQUI RED.Note: The parameter TT (08H) sets the maximum value of torque that the programme may not exceed.The true torque bei ng used at the ti me can be seen at Address 90 in RAM.How it works ...During stoppinq, the programme controls how far the car will travel at the final portion of thevelocityidistance curve in accordance with the torque value and the speed at which the value of turquewill be i ncremented.Example: "ET7'=03 ... at 4Hz the car will move a further 3*2mm=6mm. If the car is liable toovershoot, the programme will increase the reverse torque t ~y 1 point everq 4OOms tu ensure floorlevelling accliracy. This sutornatic increnientation wi11 stop when the n-mxirnum value progrsmrried iritoTT is reac hed.*REFERENCES TQ EALANCED CAR MEAN COUNTERWEIGHT ACCURATELY BALANCED AT 50% ORTHEREABOUTS.
23) INTERCONNECTIONS BETWEEN THE BETA DRIVE AND THEDELTA LOGIC PANEL.11 The power supply for the electronic part of the Drive Panel is O, 9V or1BV A.C. These voltages are taken from the secondary of the LogicPanel transformer and go to connector K03 on the Drive Panel.2) Commands for speeds V0, V 1 et V2 are sent via a flat 14 pointconnection wire . It cornes from JO8 on the Logic Panel and goes toJO1 on the Drive Panel. This 14 point wire also carries 3 sets ofinformation back from the Drive Panel to the Logic Panel.STOPR: This signai STOP REGULATlON indicates to the Logic Panelthat the movement is finished.DEFDEF: This signal PERMANENT FAULT indicates to the Logic Panelthat the Drive Panel has detected a problem implying a permanent fault.The faul t code flashes up on the Drive Panel.The Logic Panel will flash up fault 6.5 at the same time.DEFPRO: This signal TEMPORARY FAULT indicates to the Logic Panelthat the Drive Panel has detected a problem impl ying a temporary fault.The fault code flashes up on the Drive Panel.The Logic Panel will flash up faul t 66 at the same time.31 The direction UP or DOWN, given by the Logic Panel, is done vin theappropriate relays. l nstead of commanding the contactors, these relayscommand the opto couplers placed on the Drive Panel. Each couplertherefore has one side connected to the 10 on the safety lane, andthe other connected to the output of relays HO and DE (K8).4) Having connected the 003 Tape-head to the UND04 board on KC22, thecomrnands CAA and CAB are retransmitted to the Logic Panel on KC22from the connector K4.PANEL.KC22
24) Summary of lnput and Output abbreviations in alphabetical order,followed by their meaning.After the meaning is the address and segment where the Input/Output is found.BPA 1BPA2CAACABCAMCLC0l.lC01.2CREPCS 1CS2CO-C7DEDEF0047Automatic Door 1 Locking.Automatic Door 2 Locking.Tape-head, beam A inputTape-head. beam B inputRetiring romp relay outputIn Use indicator outputDoor 1 safety knuckle inputDoor 2 safety knuckle inputSerial signal for digital displDoor 1 photocell inputDoor 2 photocell inputCar call button inputs,levels O to 7Ad FDAd FDAd 11Ad 11Ad 13Ad 15Ad OFAd 10lay Ad 13Ad OFAd 10Ad O0Down output switch. Ad 13Out of order output (Fault) Ad 15Landing cal1 button inputs, Ad 06levels O to 7.seg 5seg 5seg Oseg 1seg 3seg 1seg 3seg 3seg 7seg 2seg 2seg Oto7seg 1seg 7seg O to 7RFRKISORZONESHBSIXSTHSTOPRSUSUS0Overload buzzer outputRe-levelling contactor checkRelay for zone given bytape-head PO 1 inputOutputlnput "6" to the safety laneMotor thermostat inputSTOP Regulation OutputOverload lnputDeparture delay inputAd 15 seg 2Ad OE seg 7Ad OE seg 6Ad 14 seg 4Ad 12 seg OAd 12 seg 3Ad OD seg 7Ad OC seg 7Ad O€ seg 1THV Heat ventilation lnput Ad OD seg 4VHSvpnpVSUOutofserviceindicatoroutputFire control indicator outputOverload indlcator outputAd 14 seg 2Ad 15 seg OAd 15 seg 3Re-levelling movement zone output Ad 13 seg 1ECOFREXDEXHBrake conserver output.Extreme DOWN input.Extreme UP input.seg 7seg 3seg 2FCFE 1FCFE2FCOU 1FCOU2FDFE 1FE2FF 1FF2FHFREV16VINH 1INH 2INSHANHASSnHsHO-H7PHPOHPOSO-P0S7PRlCDoor 1 closed limit inputAd OF seg 1Door 2 closed limit input Ad 10 seg 1Door 1 open limit inputAd OF seg ODoor 2 open limit input Ad 10 seg ODown direction amw outout Ad 14 Seo 5Door 1 close signal output Ad 13 seg 5Door 2 close signal output Ad 14 seg 1Door 1 close button input Ad OF seg 4Door 2 close button input Ad 10 seg 4Up direction amw output Ad 14 seg 4Up test limit input Ad OC seg 6Down inspection movement input. Ad OC seg 1Up inspection movement input . AdOC seg 2Gong output. Ad 14 seg 6GV/PV output. Ad 13 seg 2Inspection on high speed input Ad OE seg 4Inhibition 1 Ad 13 seg 2inhibition 2 Ad 14 seg 3Inspection input Ad OC seg 3Car light output Ad 13 seg 6Machine Roorn test input Ad OC seg 4Mass detectlon relay Ad OC seg OOut of service input Ad OE seg 1Car cal1 button input levels O to 7. Ad 03 seg O to 7Non-stop input Ad OE seg 3Door 1 open signal outpc~t Ad 13 seg 4Door 2 open signal outputAd 14 seg OPhase failure input Ad OD seg 5Fire contml input Ad OE seg OPosition outputs, levels O to 7. AdlF segOto7Goods contml Input Ad 62 seg 2Car cal1 acceptance outputs, Ad16 segOto7levels O to 7.Down landing call acceptance outputs, Ad 1C seg O to 7levels O to 7.Up landing call acceptance outputs, Ad 19 seg O to 7levels O to 7.ADDRESSES OF THE INPUTS AND OUTPUTS ON THE DELTA 2 PANEL.
Çurnmary of inputs and outpitts on the Oeta (?rive inalphabetical order, with abbreuiation rneaningç-After the rneaninç is the address where the Input!Output is found,fnllowed by the page where you w!?! flnd sdditjonal information.CAA:CAB:Tape-head, beam A input.Tape-head, beam B input.D: Down direction tnputDEFDEÇ: Permenant fault output.DEFPR0:Temporary fault outputDiSJUN: DIçJUNctton tnput.Do: Slow down distance for VOin mllltmetres.Dl: Slow down distance for V 1in millimetres.Tens and Units.Dl: Slow down dlstance for V 1in mtllimetres. Thousands and Hundreds.011: Slow down distance for V2in millimetres. Tens and Units.Dil. Slow down distance for V2in mtllimetres. Thousands and Hundreds.Fr:Frequency applied ta the motorAd 0 7 seg 1 Page 72Ad 07 sqO Page 72Ad 00 seg4 Page 70Ad 0 1 se93 Page 7 1Ad 0 1 seg2 Page 7 1Ad O 1 seg0 Page 70Ad Ob Page73Ad Od Page 73Ad OC Page 73Ad OF Page 73Ad OE Page 73Ad 06 Page 72s:STOPR:t':tc:VO:VI:V2:VENT:vt:Line contactor relay output.Up dtrectton input.Safety contactor relay output.STOP Regulatton output.Temperature measure.Condensor voltage measure.Speed O demand Input ( VO 1.Speed 1 demand tnput ( V1 ).Speed 2 demand tnput ( V2 ).Fan m!ay output.flomentay speed measure.ln centtmetres per second.flomentay speed measure.in metres per second.Ad 0 1 seg7 Page 7 1Ad 00 seg3 Page 70Ad01 Page71Ad 0 1 seg4 Page 7 1Ad 02 Page 72Ad 05 Page 72Ad 00 seg5 Page 70Ad 00 seg6 Page 70Ad 00 seg7 Page 70Ad O 1 seg5 Page 7 1Ad09 Page 73Ad08 Page 73ADDRESSES OF IrCPUTS, OUTPUTS AND VARIABLES ON THE BETA DRIVE PANEL-INPUTS INPUTS INPUTÇ INPUTSAd AD seg7 1 seq6 ) seq5 1 seq4 1 seg3 1 seq2 1 seql 1 seqOI - t00 En V2 1 VI 1 VO 1 D 1 ti 1 1 IDISJUNIIOUTPUTS OUTPUTÇ OUTPUTS I3UTPUTSAD / seg7 1 seg6 1 seg5 1 seg4 1 seg3 1 seg2 1 segl 1 segOI Ioi 1 so 1 L / SECU 1 VEM ( STOPR 1 DEFOEF~DEFPRO~ 1O2 t0 1 RADIATOR TEîlPERkTURE ( DEGREES 1.05 1 tc VOCTAGE CAPACITOR ( 10 VOLTS ).06 1 Fr FREQUENCV ( HERTZ 1,O8 vl MtjflENTARY SPEED C MIS 1.09 vi MOMENTARY SPEED (cH/s),OAObOCOdO€OFDo 1 SLOW DOWN DISTANCE FOR VO ( MILLIMETRES 1.D!DiSLOW DOWN DISTANCE FOR V 1 C tl!LLltlETRES,l 000'sD100's 1.SLOW DOWN DISTANCE FOR VI ( îlILLlHETRES, IO'S, 1 1,011 SLOW DOWN OISTANCE FOR V2 ( MILLICiETRES,1000's, 100's )DI1 1 ÇLOW DOWN DISTANCE FOR V2 ( MILLIMETRES. 10's. 1 1.
Definition of addresses in ascending order of theinputç and outputs of the " BETA DRIVE ".This information is given with segments or decimâlly.The little red switch must be in the up position.ADDRESS En (001:ÇEGHENT 7: V2 ( Speed 2 ).lndicates the state of the input demand for çpeed V2.Segment 7 lights up when the lift is required to move at speed V2.ln the contrary case, it is not lit.ÇEGMEIUT 6: V 1 ( Sgeed 1).lndicates the state of the input demand for speed V 1.Çegment 6 Iights up whert the lift iç required to move at speed V 1 .In the contrary case, it is not lit.SEGHEMT 5: '30 ( Vitesse O ).lndicates the state of the input demand for speed VO.Segment 5 Iights rtp up when the lift is required to move at speed VO.In the contrary case, it is not lit.SEGMENT 4: D ( Uown 1.Indicates the state of the input demand to go Down.Segment 4 lights up when the lift iç required to move dawn.In the contrary case, it is not lit.SEGMENT 3: M ( UP ).lndicates the state of the input demand to go UP.Segment 3 lights up when the lift is required to move LbP.ln the contrary case, it iç not lit.ÇEGMENT 1: HOT UÇED.ÇEGHENT O: DISJUN ( D1ÇJUr4ction )Indicates the state of the input to detect DlSJUNction (break in circuit).Segment O lights up if: the '' Beta Drive " hes detected thedisj-unctian.ln the contrary case, it is nat lit. The Beta Drive breaksthe circuit if the current momentarily exceeds the transistorspecifications.
ADDRESS Sa (0 1.1:SEGMENT 7: L ( Line relsy ).lndicates the çtste gf the output actitjsting the Line re!ey.Segment 7 f ights up when the o~tput iç ecfi~atedrelay!n the contraryl case, it is not lit.to close the IineSEGMENT 6: Y C Ssfety Relay 1.Indicates the st-éte of the output activat-ing t-he sofety Relaiy.Segment 6 lights uip when the out-put is ectiuated t-o close t-hesafety relay.In the contrary case, i t is not lit.SEGMENT 5: VENT ( Ventilstar relay 1.Indicates the st-ste of t-he output acti?stinç the ventiletoh refay.Segment 5 lights up when t-he output iç activateb t- close theuentilator relay .In the contrary case, it iç not lit.Rernember that the transistor cooling ventil atm-, activated st eachmovement is maintaineci for 2 minutes after the mo8:rement hasstopped. !f the cooler sttains 30QC, the f;entilator 1s éctivatedpermenant1 y.SEGMENT 4: STOP!? ( ÇTOP Regulst-ion 1.lndicates the state of the output Stop Regulation .Segment 4 l?ghts up when the lift is at rest.Segment 4 is not lit when lift is moving.SEGMENT 3: DEFDEF ( DEFini tive fsult ).Indicates the type of daul t shown on the communication device.Segment 3 lights up when the fault is definitive.In the contrary case, it is not lit.SEGMENT 2: DEFPRO ( Temporarg faul t ).Indicates the type of fault shown on the communication device.Segment 2 lights up when the faralt is temporary.In the contrary case, it is not lit.SEGMENT 1: HOT USED.SEGMENT O:NOT USEQ-
At this addresç, one can read the tempersture of the cooling rsdistorfor the power transistors. This tempersture is expreçsed in degrecsCelsius wi th s tolerence of + or - 2 degrees.ADDRESS tc 405):Vol tsge Cspéci tor.At. thiç address, one can resd the voltage at the capâcitarterminalsThe reading is given in milltiples of ten Volts.Exsmple: A sector voltage of 380 Volts gives s voltage of 5481 Volts0.C- at the condensor terminals. A sector voltage of 400 Volts gi!res ivoltage of 565 Volts D-C- on the condensor termina?.ADDRESS Fr fOfj):Çrequency.At this address, one can read the f requency at that particular momentbeing applied to the motor.This frequency is expressed in Hertz.ADDREÇS CA (07):TAPE-HEAD-SEGMENT 7: NOT UÇED.SEGMENT 6: NOT USED.SEGMENT 5: MOT USED-SEGMENT 4: NOT USE#..SEGMENT 3: NQT USED.SEGMENT 2: NOT USED.SEGMENT 1: CAA ( Tape-head beam A ).Indicates the state of beam A on the tape-head 003.Segment 1 lights up when beam A est broken.In the contrary case, it is not lit.LE SEGMENT O: CAB ('Tape-head beam B ). ,lndicates the state of beam 6 on the tape-head 003.Segment O lights up when beam B est broken.In the contrary case, it is not lit.
ADDRESS Y! COB):Mornentary speedAt thfs address, one can ree-d the rnomentery speed of the car.The speed is expressecf in Metres per secsnd-ADDRESÇ ~i @9!:Mornentsry speed.At this address, one ran read the rnomentary speed of the car.This speed, to be sdded to ul is expressed in Cerztimetressecond.pcrADDREIÇ Do (Fb):Deceleration distance for spe~d o ( VO 1.At this address, one cen read the deceleration distance aiscci~it-ed withspeed VO.This dist-ance, is givin in mi!'limetret.At this address, one cen read the deceleration distante arroriated withspeed V 1, which is gitren as a four figure ni-~mber in millirnetres and indecimal. At Dl you reac! the hundreds and the thoucfonds. See Di forthe tenç and unit-S.ADDREÇS Di COdll: Decelerat-ion distance for spped 1 ( V 1 1.At this addr~ss, one can read the deceleration distanc~ assriciated with . speed V 1, which ir given as a foi~r figure number in millimetres and indecimal. At Di you read the tens and the units. See Di flir the hundredsand the t horrsends.ADDRESS DI 1 CQEk Deceleration dist-ance for speed 2 ( V2 !.At this address, one can read the thoustlnds and hunYreds figures ofthe deceleration distance expressed in millimetries and in bectmal.See Dii for the tens and units.ADDRESS Dii IOFI: Decelerat-ion distance for speed 2 (' V2 ).At this addreçs, one can read the tens and units figures of thedeceleration distance expressed in millimetres and in decimal.See DI1 for the thousands and hundreds.
25) Summary of parameter abbreviations in alphabeticalorder,followed by their meanings.After the meaning is the address where the parameter is found,followed by the page where yau will find additianal information.BBTFSBBTSSBDRIVEBG 126613BOTLEVCALCANCALSLZCCnASKCFBLCLFCONFALCÇDZDl01Dl010201020 1D2TDCHASKDFCDFCDIFDOR 1 CFDOR 1 CLDOR 1 DRDOR 1 EXTD 1 A+SDD 1 A+SDDOR 1 HOTDOR 1 OLDOR 1 PSDOR 1 RODDOR 1 ROTDORlTlliDOR2CFDORSCLDOR2DRDOR2EXTD2A+SDD2A+SDDOR2ilOTDOR20LDOR2PSDOR2RODDaR2ROTDORFALTDOWCOLORODDDTF2 Speed ? Ad OB seg 7 Page 42Beam Broken Tlme in Fast Speed ? ~d O€ Page 46Beam Broken Time In Slow S~eed ? Ad OF Page 46Beta DRIVE 7 Ad 63 seg 4 Page 596612 Board? Ad SC seg 4 Page 55BG 13 Board ? Ad SC seg 2 Page 55BOTtom LEVel ? Ad 05 Page 40CAL1 CANcel Optlon 7 Ad 08 seg 3 Page 43Allow CALls in the SLOW Zone 7 Ad 07 seg 2 Page 42Car Calls HASKlng 0-7 ? Ad 10 Page 46Code of Fault Before Last. Ad O1 Page 39Code for Last Faul t. Ad 00 Page 39CONtactor FAuLt permanent 7 Ad 07 seg 6 Page 41Cmssed Slow Down Zones. Ad 19 Page 48Door 1 Openlng Inhibit 7 Ad 48 seg 1 Page 53Door 1 Openlng Inhibit 7 Ad 49 seg 1 Page 55Door 2 Opening lnhibit 7 Ad 68 seg 1 Page 6 1Door 2 Opening lnhibit ? Ad 69 seg 1 Page 62Door 2 Timing 7 Ad 61 Page 58Down Calls HASKing 0-7 7 Ad 16 Page 46Door Force when Closed 7 Ad 40 seg 6 Page 50Door Force when Closed ? Ad 60 seg 6 Page 56Direction Indicator Flashing 7 Ad 08 seg 5 Page 43DOoR 1 Closing Force when Novlng7Ad 40 seg 2 Page 50DOoR 1 Without Closed Limit 7 Ad 40 seg 4 Page 50DOoR 1 DRift O.K.? Ad 40 seg 1 Page 51DOoR 1 EXTended Close Time 7 Ad 40 seg 3 Page 50Door 1 Automatic + Swing Door 7 Ad 48 seg 4 Page 53Door 1 Automatic + Swing Door 7 Ad 49 seg 4 Page 54DOoR 1 Haximum Operating Tlme 7 Ad 47 Page 52DOoR 1 Without Open Limit 7 Ad 40 seg 5 Page 50DOoR 1 Permanent Signal 7 Ad40segO Page51DOoR 1 Re-Open Delay ? Ad 44 Page 52DOoR 1 Re-Open Time 7 Ad 42 Page 51DOOR 1 Tlning ? Ad 41 Page 51DOoR 2 Closing Force when Hoving7Ad 60 seg 2 Page 57DOoR 2 Without Closed Limlt 7 Ad 60 seg 4 Page 57DOoR 2 DRift O.K. 7 Ad 60 seg 1 Page 57DOoR 2 EXTended Close Tlme 7 Ad 60 seg 3 Page 57Door 2 Automatic + Swing Door? Ad 68 seg 4 Page 60Door 2 Automatic + Swing Door ? Ad 69 seg 4 Page 61DOoR 2 naximum Operating Time 7 Ad 67 Page 59DOoR 2 Without Open Limlt 7 Ad 60 seg 5 Page 57DOoR 2 Permanent Signal ? Ad 60 seg O Page 57DOoR 2 Re-Open Delay ? Ad 64 Page 59DOoR 2 Re-Open Time ? Ad 62 Page 56DOoR FAuLt Temporay ? Ad 09 seg 6 Page 44DOWn COLlective 7 Ad SC seg 6 Page 55DoorReOpenDependanton Ad 07 seg O Page 42Direction 7Door Time Factor. Ad 63 seg O Page 59EHPCAR EnPty CAR ? Ad 63 seg 7 Page 58HALLANHOHLEVHOMlHLCFLIGHTLOBBY60N6 when LEVel 7 Ad 09 seg 7 Page 44GONG Signal TlHE 7 Ad 21 Page 47HAL1 LANtems 7Honing LEVel 7HOnlng TlHeAd 08 seg 4 Page 43AD 20 Page 47Ad 1F Page 47Maximum 1NSpection TlHE 7 Ad O0 Page 45Landing Calls Flashing 7 Ad OB seg 6 Page 42Car LlGHT 7 Ad OC Page 45MAIN FLOOR 7 Ad 06 Page 41HAN INS HAchiNe mom INSpection 7 Ad 07 seg 4 Page 41NBDORNODOORNOFSDINUDGINGOFCOSDCOSFLRPD 1 OPLOPOD 1LOPODlL1POD2LOPOD2L 1PRE-OPRE-LEVRLVDCRLVDORRDRRDRRDRRDSAPBSDOISD01SD0 1SDO 1SPL INSSLTlHESUNumBer of DOoR Operators ? Ad 0 3 Page 39Car with NO DOOR ? Ad 07 seg 5 Page 41NO Fast Speed Direction IndicatotTAd 09 seg 4 Page 44NUDGING 7 Ad 63 seg 7 Page 5 8Oldest Faul t Code. Ad 7F Page 6 2Out of Service Door Closed. Ad 09 seg 2 Page 44Out of Service FLooR 7 Ad 43 Page 5 1Parklng Door 1 with OPen DoonLevel O 7Parklng Door 1 with OPen DoorsLevel I 7Parklng Door 1 with OPen DoorsLevel O 7Parking Door 1 with OPen DoorsLevel 1 ?Pre-Openlng Dow 1 at Level O 7Pre-Openlng Door 1 at Level 1 7Pre-Opening Door 1 at Level O 7Pre-Opening Door 1 at Level 1 7PRE-OPening ?Ad 48 seg 2 Page 53Ad 49 seg 2 Page 54Ad 68 seg 2 Page 6 1Ad 69 seg 2 Page 6 2Ad 48 seg 3 Page 5 3Ad 49 seg 3 Page 54Ad 68 seg 3 Page 6 0Ad 69 seg 3 Page 62Ad 63 reg 1 Page 59RE-LEVelllng ? Ad 63 seg 5 Page 58Re-LeVelling Door Closed 7 Ad 08 seg 1 Page 43Re-LeVelling Door Open 7 Ad 08 seg O Page 43Retiring Romp Delay. Ad 48 seg 7 Page 53Retlring Romp Delay. Ad 49 seg 7 Page 54Retiring Romp Delay. Ad 68 seg 7 Page 60Retirlng Ramp Delay.Ad69seg7 Page61Single Automatic Push Button 7Selectlve Doors Opening Inhiblt.Selective Doors Openlng Inhibit.Selective Doors Openlng Inhiblt.Selective Doors Opening Inhibit.SPeclaL INSpection ?SLOW speed supervision TlnE ?To use SU as "Ouerload" (SU),segments O, 1 and 2 mustbe put to O.To use SU as "Out of ServiceActivation (HUS) input, segment2 must be put to 1 and segmentsO and 1 put to O.To use SU as "Non Stop" (NS)Input, segment O must be put to 1and segments 1 and 2 put to O.Ad 07 seg 7 Page 41Ad 48 seg O Page 54Ad 49 reg O Page 55Ad 68 seg O Page 6 1Ad 69 seg O Page 62Ad 07 seg 3 Page 41Ad OB Page 45Ad 5D Page 56FCBO Fault Code Before Oldest.Ad 7E Page 62FlLT8 FlLTering of 8 ?Ad 45 Page 52Ad 5D seg 2 Page 56FlLTlO FlLTering of 10 ?Ad 1E Page 47FIRESV FlREman SerVice option ? Ad 09 seg 3 Page 44FIRETYP TYPe of FIReman Service ? Ad 09 seg 1 .OPage 44FREV To use FREV as "Final Test Llmlt" Ad 5D Page 56SUNSAd 5D seg O Page 56(FREV), segments 3.4 and 5 mustbe put to O.FREVNS To use FREV as "Non Stop" (NS) Ad 5D seg 3 Page 56 Ad 5D seg 5 Page 56SUPRIC To use SU as "Goods Contml"(CRIC) Input, segment 1 mustbe put to 1 anQ segmentsO and 2 put to O.Ad 50 seg 2 Page 56Input, segment 3 must be put to 1and segments 4 and 5 put to O.To use FREV as "Out of ServiceActivationu (IlHS) input. segment5 must be put to 1 and segments3 and 4 put to O.To use FREV as "Goods Contml"(PRICI input, segment 4 mustbe put to 1 and segments3 and 5 put to O.Fast Speed Supervision TlHE ?FULl COLlectIve ?Ad 5D seg 4 Page 56Ad OA Page 45Ad SC seg 7 Page 55Tlti 8-10TOPLEVHaximwp Tlne between 8 and 10 ? Ad 46 Page 5 2TOP LEVel ? Ad 04 Page 39UCHASK Up Cal 1s HASKlng 0:7 7 Ad 13 Page 46
MlNlBLOCK AT ADDREÇS FF.CAACABINSPQMNIV 6
TAPE PARAMETER ADDRESSES.LEVEL 6: 55 54LEVEL 7: 57 56 -IThe addresses DO à Db defined below are given in decimal andin millimetres. In case of a parameter being defined at twoaddresses, at the first address it will be given in thous~ndsand hundreds and at the second in tens and units.ZDEVER: AD d4 AND d5 (DOOR ZONE) .............................................ZONARD: AD d3 (DOWN STOP ZONE) ...............................................ZONARM: AD d2 (UP STOP ZONE) ......................................................ZONIST: AD d6 (HYSTERISIS ZONE) ................................................SLOW DOWN DISTANCE PARAMETERS.DMINV2: AD d8 AND d9 (MINIMUM DISTANCE TO USE V2) ............ZONPVI: AD dA AND db (SLOW DOWN FOR SPEED VI) ................ZONPV2: AD do AND dl (SLOW DOWN FOR SPEED V2) ................RE-LEVELLING PARAMETERS.ZONARI:AD d7 (RE-LEVELLING STOP ZONE) ................................. DRemember that the altitude counter " POSCAB " is found ataddresses 23 and 22, with the small switch in the up position.
Summary of BETA DRIVE Parameters in âlphabetical arder,fallowed by their meaning.On the right is given the address where the parameter is found. On thefar right are the page numbers where additional information can bef ound.AC:d":hd:I G:n r:Pt:SF:St:th:tt:v0:VI:v2:Vn:Accel eratian ?degree ?hardware.Slip Integratar ?number of 0,0684 and 0,0344Precision resistors ?Deccel erati onStabilisation for the liftingof the brake?Stabilisation for the droppingof the brake ?Very Gentle : comfort on initialaccel era ti on.Motor heat ?Matar torque ?Speed 0 ?Intermediate or inspectionSpeed l?Fast speed 2 ?Nominal Speed ?BETA DRIVE ADDRESS PARAMETERS.Page 64Page 66Page 65Page 65Page 66Page 63Page 64Page 64Page 65Page 64Page 64Page 63Page 63Page 63Page 6300010203040506070809OAObOEOF10VOV 1V2VnPtAcStSFttthIGtdhdd"nrSET-UP OR RE-LEVELLING SPEED ( HZ ).INTERMEDIATE OR INSPECTION SPEED ( Hz 1.FAST SPEED ( Hz ).NOMINAL SPEED ( INCREMENTS OF 0,l MlS ).SLOPE.ACCELERATION ( SECONDS ).STABILISATION FOR DROPPING THE BRAKE ( 1 OMS 1.STABILISATIONFORLlFTlNGTHEBRAKE(10HS).MOTOR TORQUE ( SECONDS).NOTOR HEAT ( AMPERES 1.SLIP INTEGRATOR ( 0,l SECONDS ).VERY GENTLE: COMFORT AT INITIAL ACCELERATION.HARDWARE.CALIBRATION OF THE TEMPERATURE SENSOR.(DEGRES).NUMBER OF 0,0680 OR 0,0340 PREClSlON RESISTORS.