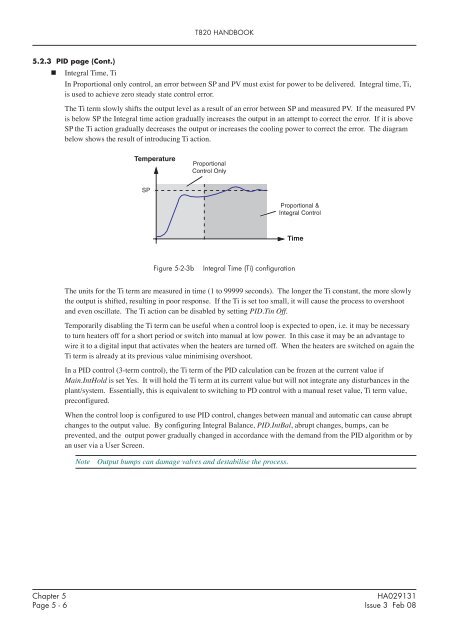
T820 HANDBOOK5.2.3 PID page (Cont.)• Integral Time, TiIn Proportional only control, an error between SP and PV must exist for power to be delivered. Integral time, Ti,is used to achieve zero steady state control error.The Ti term slowly shifts the output level as a result of an error between SP and measured PV. If the measured PVis below SP the Integral time action gradually increases the output in an attempt to correct the error. If it is aboveSP the Ti action gradually decreases the output or increases the cooling power to correct the error. The diagrambelow shows the result of introducing Ti action.TemperatureProportionalControl OnlySPProportional &Integral ControlTimeFigure 5-2-3bIntegral Time (Ti) configurationThe units for the Ti term are measured in time (1 to 99999 seconds). The longer the Ti constant, the more slowlythe output is shifted, resulting in poor response. If the Ti is set too small, it will cause the process to overshootand even oscillate. The Ti action can be disabled by setting PID.Tin Off.Temporarily disabling the Ti term can be useful when a control loop is expected to open, i.e. it may be necessaryto turn heaters off for a short period or switch into manual at low power. In this case it may be an advantage towire it to a digital input that activates when the heaters are turned off. When the heaters are switched on again theTi term is already at its previous value minimising overshoot.In a PID control (3-term control), the Ti term of the PID calculation can be frozen at the current value ifMain.IntHold is set Yes. It will hold the Ti term at its current value but will not integrate any disturbances in theplant/system. Essentially, this is equivalent to switching to PD control with a manual reset value, Ti term value,preconfigured.When the control loop is configured to use PID control, changes between manual and automatic can cause abruptchanges to the output value. By configuring Integral Balance, PID.IntBal, abrupt changes, bumps, can beprevented, and the output power gradually changed in accordance with the demand from the PID algorithm or byan user via a User Screen.NoteOutput bumps can damage valves and destabilise the process.Chapter 5Page 5 - 6HA029131Issue 3 Feb 08
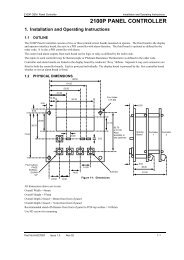
T820 HANDBOOK5.2.3 PID page (Cont.)• Derivative Time, TdDerivative time, Td action, or rate, provides a sudden shift in output as a result of a rapid change in error, whetheror not this is caused by PV alone (derivative on PV) or on SP changes as well (derivative on error selection). Ifthe measured PV falls quickly, the Td provides a large change to the output in an attempt to correct the change inerror before it goes too far. It is most beneficial in recovering from small error changes.TemperatureTemperatureSPSPProportional & IntegralresponseProportional & IntegralresponseTimeResponse without configured Derivative actionTimeResponse with configured Derivative actionFigure 5-2-3cDerivative Time (Td) configurationNoteA reduction to wear on valve control can be achieved by configuring Td to react to PV changes,whereas, configuring the Td to react to changes to Error, difference between PV and SP, will redueramp overshoot, and allows rapid response to small SP changes in temperature control systems.The Td modifies the output to reduce the rate of error changes. It reacts to changes in the PV by changing theoutput to remove the errors . Increasing the Td will reduce the settling time of the loop after a change.Td is often mistakenly associated with overshoot inhibition rather than error response. In fact, Td should not beused to curb overshoot on start up since this will inevitably degrade the steady state performance of the system.Overshoot should be configured using the High and Low Cutback control parameters.Td is generally used to increase the stability of the loop, however, there are situations where Td may be the causeof instability, e.g. if the PV is noisy, Td can amplify that noise and cause excessive output changes. In thesesituations it is often better to disable the Td and re-tune the loop. The Td can be disabled by setting PID.Tdn Off.Td can be calculated on change of PV or change of error. If configured on error, changes in the SP will betransmitted to the output. For applications such as furnace temperature control, it is common practice to select Tdon PV to prevent thermal shock caused by a sudden change of output as a result of a change in SP.• Relative Cool Gain, R2GThe Relative Cool Gain, R2G, is a tuning parameter corresponding to the gain of channel 2 control output, relativeto the channel 1 control output.R2G compensates for the different quantities of power available to heat, as opposed to that available to cool, aprocess, e.g. water cooling applications might require an R2G value of 0.25 because cooling is 4 times greaterthan the heating process at the operating temperature.NoteThis parameter is set automatically when the Autotune process is performed.HA029131Issue 3 Feb 08Chapter 5Page 5 - 7