


Modeling and Simulation of Vehicular Power Systems - webfiles its ...
Modeling and Simulation of Vehicular Power Systems - webfiles its ...
Modeling and Simulation of Vehicular Power Systems - webfiles its ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
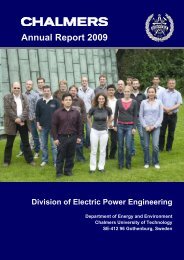
CBD Drive Cycle3530Speed (Km/h)252015105004.89.614.419.22428.833.638.443.24852.857.662.467.27276.8Time (sec)Figure 7-6 City Bus Drive cycle (CBD)The driving cycles are modeled using look-up tables <strong>and</strong> are considered as inputs for thesimulation instead <strong>of</strong> manual pushing <strong>of</strong> brake <strong>and</strong> throttle pedal.7.6 Automatic DriverTo simulate the behavior <strong>of</strong> a driver following up a certain drive cycle, a model isrequired to calculate the required wheel torque. This model is called automatic driver. Itconsists <strong>of</strong> a PI controller having the reference driving cycle, actual speed <strong>of</strong> the vehicle<strong>and</strong> grade as inputs. Its output is the reference wheel torque to trace the drive cycle. Inorder to increase the functionality <strong>of</strong> the PI controller a feed forward loop is used. Thisloop based on the reference speed <strong>and</strong> grade, calculates the traction torque needed fortracing the reference drive cycle. The error between the reference speed <strong>and</strong> the actualspeed is compensated by adding another torque calculated by the PI controller. In order toprevent integrator windup, the integrator is reset each time the speed falls down to zero.The block diagram is shown in figure 7-7.46








![LAPLACE OPERATOR.ppt [Lecture seule]](https://img.yumpu.com/42909900/1/190x135/laplace-operatorppt-lecture-seule.jpg?quality=85)


