Sterowanie Procesami Ciągłymi
Sterowanie ze sprzezeniem od stanu
Sterowanie ze sprzezeniem od stanu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
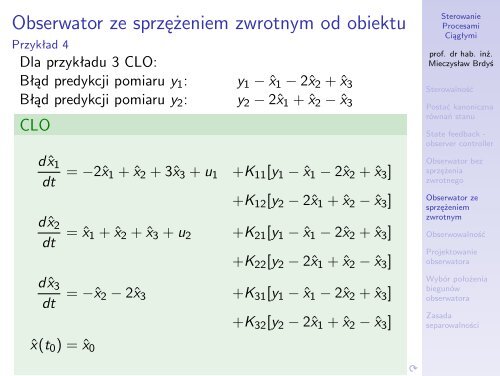
Obserwator ze sprzężeniem zwrotnym od obiektu<br />
Przykład 4<br />
Dla przykładu 3 CLO:<br />
Błąd predykcji pomiaru y 1 : y 1 − ˆx 1 − 2ˆx 2 + ˆx 3<br />
Błąd predykcji pomiaru y 2 : y 2 − 2ˆx 1 + ˆx 2 − ˆx 3<br />
CLO<br />
<strong>Sterowanie</strong><br />
<strong>Procesami</strong><br />
<strong>Ciągłymi</strong><br />
prof. dr hab. inż.<br />
Mieczysław Brdyś<br />
Sterowalność<br />
Postać kanoniczna<br />
równań stanu<br />
State feedback -<br />
observer controller<br />
dˆx 1<br />
dt<br />
dˆx 2<br />
dt<br />
dˆx 3<br />
dt<br />
= −2ˆx 1 + ˆx 2 + 3ˆx 3 + u 1 +K 11 [y 1 − ˆx 1 − 2ˆx 2 + ˆx 3 ]<br />
+K 12 [y 2 − 2ˆx 1 + ˆx 2 − ˆx 3 ]<br />
= ˆx 1 + ˆx 2 + ˆx 3 + u 2 +K 21 [y 1 − ˆx 1 − 2ˆx 2 + ˆx 3 ]<br />
+K 22 [y 2 − 2ˆx 1 + ˆx 2 − ˆx 3 ]<br />
= −ˆx 2 − 2ˆx 3 +K 31 [y 1 − ˆx 1 − 2ˆx 2 + ˆx 3 ]<br />
+K 32 [y 2 − 2ˆx 1 + ˆx 2 − ˆx 3 ]<br />
Obserwator bez<br />
sprzężenia<br />
zwrotnego<br />
Obserwator ze<br />
sprzężeniem<br />
zwrotnym<br />
Obserwowalność<br />
Projektowanie<br />
obserwatora<br />
Wybór położenia<br />
biegunów<br />
obserwatora<br />
Zasada<br />
separowalności<br />
ˆx(t 0 ) = ˆx 0