Sterowanie Procesami Ciągłymi
Sterowanie ze sprzezeniem od stanu
Sterowanie ze sprzezeniem od stanu

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
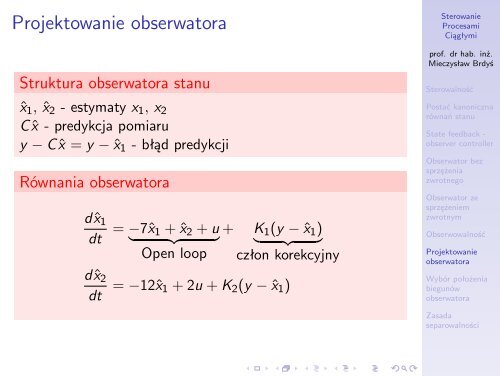
Projektowanie obserwatora<br />
Struktura obserwatora stanu<br />
ˆx 1 , ˆx 2 - estymaty x 1 , x 2<br />
C ˆx - predykcja pomiaru<br />
y − C ˆx = y − ˆx 1 - błąd predykcji<br />
Równania obserwatora<br />
dˆx 1<br />
dt<br />
dˆx 2<br />
dt<br />
= −7ˆx 1 + ˆx 2 + u +<br />
} {{ }<br />
K 1 (y − ˆx 1 )<br />
} {{ }<br />
Open loop człon korekcyjny<br />
= −12ˆx 1 + 2u + K 2 (y − ˆx 1 )<br />
<strong>Sterowanie</strong><br />
<strong>Procesami</strong><br />
<strong>Ciągłymi</strong><br />
prof. dr hab. inż.<br />
Mieczysław Brdyś<br />
Sterowalność<br />
Postać kanoniczna<br />
równań stanu<br />
State feedback -<br />
observer controller<br />
Obserwator bez<br />
sprzężenia<br />
zwrotnego<br />
Obserwator ze<br />
sprzężeniem<br />
zwrotnym<br />
Obserwowalność<br />
Projektowanie<br />
obserwatora<br />
Wybór położenia<br />
biegunów<br />
obserwatora<br />
Zasada<br />
separowalności