Sterowanie Procesami Ciągłymi
Sterowanie ze sprzezeniem od stanu
Sterowanie ze sprzezeniem od stanu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
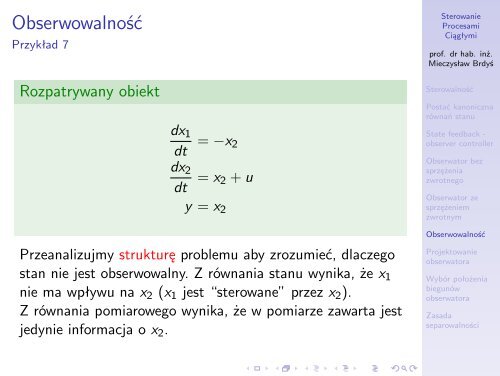
Obserwowalność<br />
Przykład 7<br />
Rozpatrywany obiekt<br />
dx 1<br />
dt = −x 2<br />
dx 2<br />
dt = x 2 + u<br />
y = x 2<br />
<strong>Sterowanie</strong><br />
<strong>Procesami</strong><br />
<strong>Ciągłymi</strong><br />
prof. dr hab. inż.<br />
Mieczysław Brdyś<br />
Sterowalność<br />
Postać kanoniczna<br />
równań stanu<br />
State feedback -<br />
observer controller<br />
Obserwator bez<br />
sprzężenia<br />
zwrotnego<br />
Obserwator ze<br />
sprzężeniem<br />
zwrotnym<br />
Przeanalizujmy strukturę problemu aby zrozumieć, dlaczego<br />
stan nie jest obserwowalny. Z równania stanu wynika, że x 1<br />
nie ma wpływu na x 2 (x 1 jest “sterowane” przez x 2 ).<br />
Z równania pomiarowego wynika, że w pomiarze zawarta jest<br />
jedynie informacja o x 2 .<br />
Obserwowalność<br />
Projektowanie<br />
obserwatora<br />
Wybór położenia<br />
biegunów<br />
obserwatora<br />
Zasada<br />
separowalności