Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Simotion</strong> <strong>Easy</strong> <strong>Basics</strong> reviewed<br />
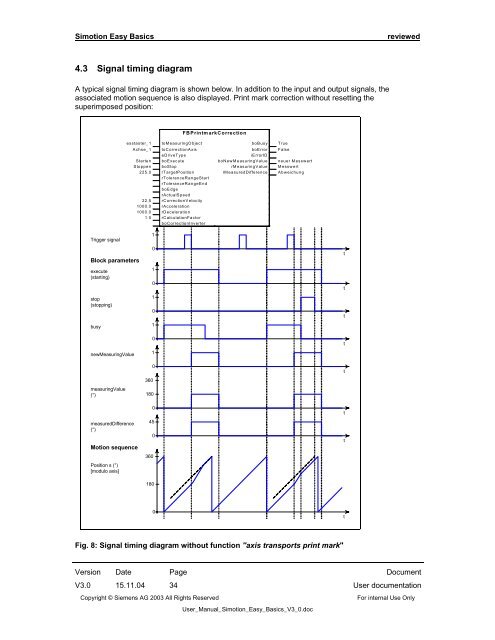
4.3 Signal timing diagram<br />
A typical signal timing diagram is shown below. In addition to the input and output signals, the<br />
associated motion sequence is also displayed. Print mark correction without resetting the<br />
superimposed position:<br />
Trigger signal<br />
Block parameters<br />
execute<br />
(starting)<br />
stop<br />
(stopping)<br />
busy<br />
newMeasuringValue<br />
measuringValue<br />
(°)<br />
measuredDifference<br />
(°)<br />
Motion sequence<br />
Position s (°)<br />
[modulo axis]<br />
esstaster_1<br />
FBPrintmarkCorrection<br />
toMeasuringObject boBusy True<br />
Achse_1 toCorrectionAxis boError False<br />
eDriveType iErrorID<br />
Starten boExecute boNewMeasuringValue neuer Messwert<br />
Stoppen boStop rMeasuringValue Messwert<br />
225.0 rTargetPosition<br />
rToleranceRangeStart<br />
rToleranceRangeEnd<br />
boEdge<br />
rActualSpeed<br />
rMeasuredDifference Abweichung<br />
22,5 rCorrectionVelocity<br />
1000.0 rAcceleration<br />
1000.0 rDeceleration<br />
1.0 rCalculationFactor<br />
boCorrectionInverter<br />
1<br />
1<br />
0<br />
1<br />
360<br />
0<br />
0<br />
1<br />
360<br />
0<br />
1<br />
0<br />
180<br />
0<br />
45<br />
0<br />
180<br />
0<br />
Fig. 8: Signal timing diagram without function "axis transports print mark"<br />
Version Date Page Document<br />
<strong>V3.0</strong> <strong>15.11.04</strong> 34 <strong>User</strong> documentation<br />
Copyright © Siemens AG 2003 All Rights Reserved For internal Use Only<br />
<strong>User</strong>_Manual_<strong>Simotion</strong>_<strong>Easy</strong>_<strong>Basics</strong>_V3_0.doc<br />
t<br />
t<br />
t<br />
t<br />
t<br />
t<br />
t<br />
t