Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Simotion</strong> <strong>Easy</strong> <strong>Basics</strong> reviewed<br />
segmentProfile Parameters required<br />
PROFILE_LINEAR -<br />
PROFILE_POLYNOMIAL_<br />
ORDER_3<br />
PROFILE_POLYNOMIAL_<br />
ORDER_5<br />
followingRangeStartDerivation1<br />
followingRangeEndDerivation1<br />
followingRangeStartDerivation1<br />
followingRangeEndDerivation1<br />
followingRangeStartDerivation2<br />
followingRangeEndDerivation2<br />
Parameters not taken into<br />
account<br />
followingRangeStartDerivation1<br />
followingRangeEndDerivation1<br />
followingRangeStartDerivation2<br />
followingRangeEndDerivation2<br />
followingRangeStartDerivation2<br />
followingRangeEndDerivation2<br />
Table 11: Limitations required for the profile types<br />
Up to and including <strong>Simotion</strong> Version 2.0, when calculating the curves in the standard range,<br />
maximum values could be exceeded. This is the reason that an application-based calculation can be<br />
carried-out.<br />
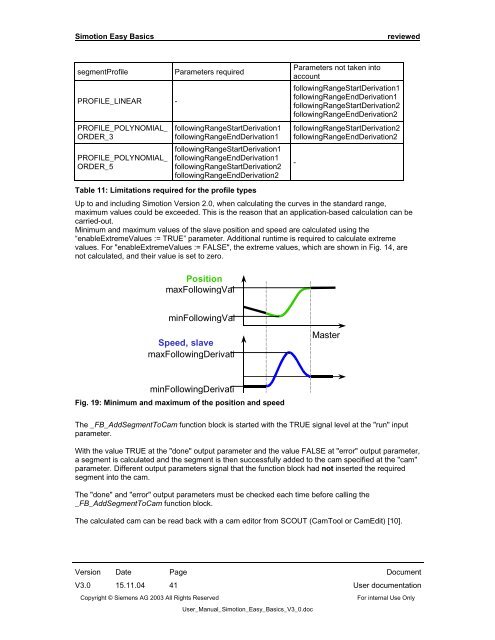
Minimum and maximum values of the slave position and speed are calculated using the<br />
“enableExtremeValues := TRUE” parameter. Additional runtime is required to calculate extreme<br />
values. For "enableExtremeValues := FALSE", the extreme values, which are shown in Fig. 14, are<br />
not calculated, and their value is set to zero.<br />
Position<br />
maxFollowingVal<br />
minFollowingVal<br />
Speed, slave<br />
maxFollowingDerivati<br />
minFollowingDerivati<br />
Fig. 19: Minimum and maximum of the position and speed<br />
Version Date Page Document<br />
<strong>V3.0</strong> <strong>15.11.04</strong> 41 <strong>User</strong> documentation<br />
Copyright © Siemens AG 2003 All Rights Reserved For internal Use Only<br />
<strong>User</strong>_Manual_<strong>Simotion</strong>_<strong>Easy</strong>_<strong>Basics</strong>_V3_0.doc<br />
-<br />
Master<br />
The _FB_AddSegmentToCam function block is started with the TRUE signal level at the "run" input<br />
parameter.<br />
With the value TRUE at the "done" output parameter and the value FALSE at "error" output parameter,<br />
a segment is calculated and the segment is then successfully added to the cam specified at the "cam"<br />
parameter. Different output parameters signal that the function block had not inserted the required<br />
segment into the cam.<br />
The "done" and "error" output parameters must be checked each time before calling the<br />
_FB_AddSegmentToCam function block.<br />
The calculated cam can be read back with a cam editor from SCOUT (CamTool or CamEdit) [10].