Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Simotion</strong> <strong>Easy</strong> <strong>Basics</strong> reviewed<br />
5.2 Making calls<br />
The _FB_AddSegmentToCam function block can be called in every task. If the extreme value<br />
calculation function is activated (enableExtremeValues := TRUE), then the runtime increases.<br />
In this particular case, the call should not be made in time-critical tasks, e.g. not in the task in<br />
synchronism with the IPO.<br />
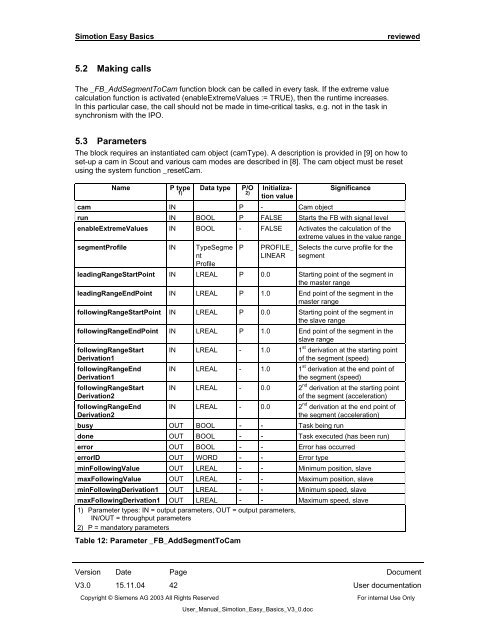
5.3 Parameters<br />
The block requires an instantiated cam object (camType). A description is provided in [9] on how to<br />
set-up a cam in Scout and various cam modes are described in [8]. The cam object must be reset<br />
using the system function _resetCam.<br />
Name P type<br />
1)<br />
Data type P/O<br />
2)<br />
Initialization<br />
value<br />
cam IN P - Cam object<br />
Significance<br />
run IN BOOL P FALSE Starts the FB with signal level<br />
enableExtremeValues IN BOOL - FALSE Activates the calculation of the<br />
extreme values in the value range<br />
segmentProfile IN TypeSegme<br />
nt<br />
Profile<br />
P PROFILE_<br />
LINEAR<br />
Selects the curve profile for the<br />
segment<br />
leadingRangeStartPoint IN LREAL P 0.0 Starting point of the segment in<br />
the master range<br />
leadingRangeEndPoint IN LREAL P 1.0 End point of the segment in the<br />
master range<br />
followingRangeStartPoint IN LREAL P 0.0 Starting point of the segment in<br />
the slave range<br />
followingRangeEndPoint IN LREAL P 1.0 End point of the segment in the<br />
slave range<br />
followingRangeStart<br />
Derivation1<br />
followingRangeEnd<br />
Derivation1<br />
followingRangeStart<br />
Derivation2<br />
followingRangeEnd<br />
Derivation2<br />
IN LREAL - 1.0 1 st derivation at the starting point<br />
of the segment (speed)<br />
IN LREAL - 1.0 1 st derivation at the end point of<br />
the segment (speed)<br />
IN LREAL - 0.0 2 nd derivation at the starting point<br />
of the segment (acceleration)<br />
IN LREAL - 0.0 2 nd derivation at the end point of<br />
the segment (acceleration)<br />
busy OUT BOOL - - Task being run<br />
done OUT BOOL - - Task executed (has been run)<br />
error OUT BOOL - - Error has occurred<br />
errorID OUT WORD - - Error type<br />
minFollowingValue OUT LREAL - - Minimum position, slave<br />
maxFollowingValue OUT LREAL - - Maximum position, slave<br />
minFollowingDerivation1 OUT LREAL - - Minimum speed, slave<br />
maxFollowingDerivation1 OUT LREAL - - Maximum speed, slave<br />
1) Parameter types: IN = output parameters, OUT = output parameters,<br />
IN/OUT = throughput parameters<br />
2) P = mandatory parameters<br />
Table 12: Parameter _FB_AddSegmentToCam<br />
Version Date Page Document<br />
<strong>V3.0</strong> <strong>15.11.04</strong> 42 <strong>User</strong> documentation<br />
Copyright © Siemens AG 2003 All Rights Reserved For internal Use Only<br />
<strong>User</strong>_Manual_<strong>Simotion</strong>_<strong>Easy</strong>_<strong>Basics</strong>_V3_0.doc