Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home
Simotion Easy Basics (SEB) 15.11.04 V3.0 User ... - Home

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Simotion</strong> <strong>Easy</strong> <strong>Basics</strong> reviewed<br />
Slave<br />
y k<br />
y i<br />
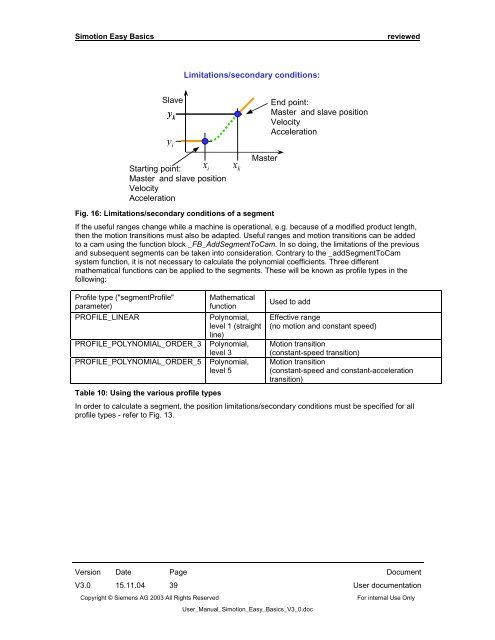
Limitations/secondary conditions:<br />
x i x k<br />
Starting point:<br />
Master and slave position<br />
Velocity<br />
Acceleration<br />
Master<br />
End point:<br />
Master and slave position<br />
Velocity<br />
Acceleration<br />
Fig. 16: Limitations/secondary conditions of a segment<br />
If the useful ranges change while a machine is operational, e.g. because of a modified product length,<br />
then the motion transitions must also be adapted. Useful ranges and motion transitions can be added<br />
to a cam using the function block _FB_AddSegmentToCam. In so doing, the limitations of the previous<br />
and subsequent segments can be taken into consideration. Contrary to the _addSegmentToCam<br />
system function, it is not necessary to calculate the polynomial coefficients. Three different<br />
mathematical functions can be applied to the segments. These will be known as profile types in the<br />
following:<br />
Profile type ("segmentProfile"<br />
parameter)<br />
Mathematical<br />
function<br />
PROFILE_LINEAR Polynomial,<br />
level 1 (straight<br />
line)<br />
PROFILE_POLYNOMIAL_ORDER_3 Polynomial,<br />
level 3<br />
PROFILE_POLYNOMIAL_ORDER_5 Polynomial,<br />
level 5<br />
Table 10: Using the various profile types<br />
Used to add<br />
Effective range<br />
(no motion and constant speed)<br />
Motion transition<br />
(constant-speed transition)<br />
Motion transition<br />
(constant-speed and constant-acceleration<br />
transition)<br />
In order to calculate a segment, the position limitations/secondary conditions must be specified for all<br />
profile types - refer to Fig. 13.<br />
Version Date Page Document<br />
<strong>V3.0</strong> <strong>15.11.04</strong> 39 <strong>User</strong> documentation<br />
Copyright © Siemens AG 2003 All Rights Reserved For internal Use Only<br />
<strong>User</strong>_Manual_<strong>Simotion</strong>_<strong>Easy</strong>_<strong>Basics</strong>_V3_0.doc