Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2. Desarrollo<br />
2.1 Modelo de Manipuladores<br />
2.2 Manipulador Programado<br />
Primero antes de documentar el brazo que se tiene se debe de hacer una ultima<br />
selección, si este brazo será manual o automático. Normalmente cuando se tiene un<br />
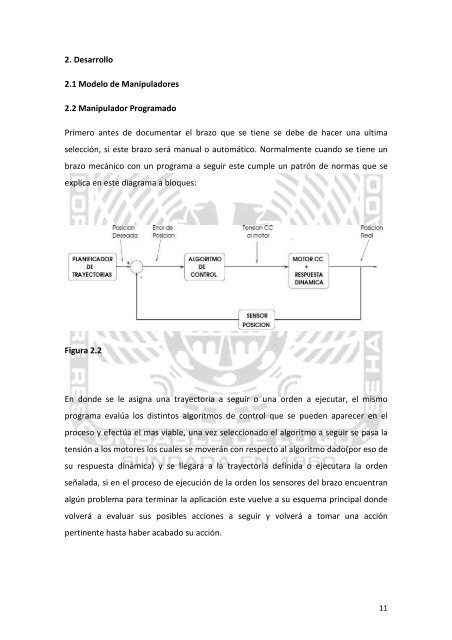
brazo mecánico con un programa a seguir este cumple un patrón de normas que se<br />
explica en este diagrama a bloques:<br />
Figura 2.2<br />
En donde se le asigna una trayectoria a seguir o una orden a ejecutar, el mismo<br />
programa evalúa los distintos algoritmos de control que se pueden aparecer en el<br />
proceso y efectúa el mas viable, una vez seleccionado el algoritmo a seguir se pasa la<br />
tensión a los motores los cuales se moverán con respecto al algoritmo dado(por eso de<br />
su respuesta dinámica) y se llegara a la trayectoria definida o ejecutara la orden<br />
señalada, si en el proceso de ejecución de la orden los sensores del brazo encuentran<br />
algún problema para terminar la aplicación este vuelve a su esquema principal donde<br />
volverá a evaluar sus posibles acciones a seguir y volverá a tomar una acción<br />
pertinente hasta haber acabado su acción.<br />
11