Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.4 Descripción<br />
Una vez descritos estos dos tipos de modelos podemos empezar a explicar nuestro<br />
manipulador, este manipulador es uno de modelo manual, asi que sus funciones serán<br />
relativamente sencillas.<br />
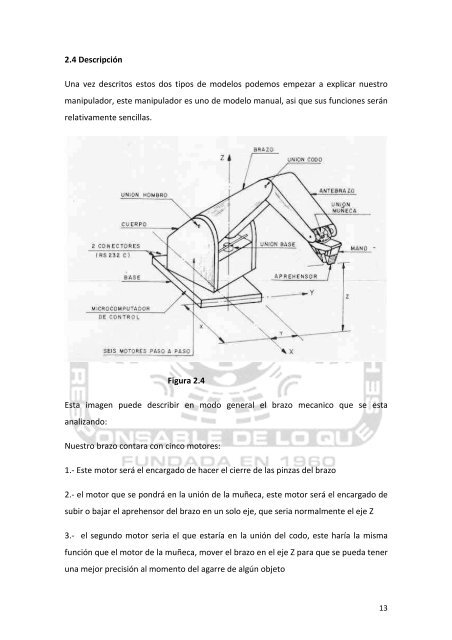
Figura 2.4<br />
Esta imagen puede describir en modo general el brazo mecanico que se esta<br />
analizando:<br />
Nuestro brazo contara con cinco motores:<br />
1.- Este motor será el encargado de hacer el cierre de las pinzas del brazo<br />
2.- el motor que se pondrá en la unión de la muñeca, este motor será el encargado de<br />
subir o bajar el aprehensor del brazo en un solo eje, que seria normalmente el eje Z<br />
3.- el segundo motor seria el que estaría en la unión del codo, este haría la misma<br />
función que el motor de la muñeca, mover el brazo en el eje Z para que se pueda tener<br />
una mejor precisión al momento del agarre de algún objeto<br />
13