Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
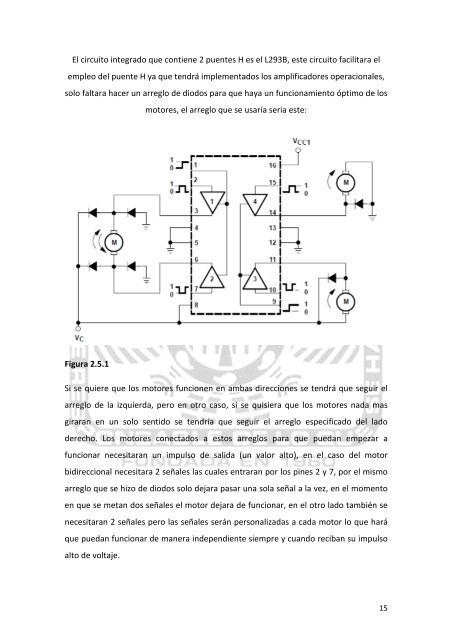
El circuito integrado que contiene 2 puentes H es el L293B, este circuito facilitara el<br />
empleo del puente H ya que tendrá implementados los amplificadores operacionales,<br />
solo faltara hacer un arreglo de diodos para que haya un funcionamiento óptimo de los<br />
motores, el arreglo que se usaría seria este:<br />
Figura 2.5.1<br />
Si se quiere que los motores funcionen en ambas direcciones se tendrá que seguir el<br />
arreglo de la izquierda, pero en otro caso, si se quisiera que los motores nada mas<br />
giraran en un solo sentido se tendría que seguir el arreglo especificado del lado<br />
derecho. Los motores conectados a estos arreglos para que puedan empezar a<br />
funcionar necesitaran un impulso de salida (un valor alto), en el caso del motor<br />
bidireccional necesitara 2 señales las cuales entraran por los pines 2 y 7, por el mismo<br />
arreglo que se hizo de diodos solo dejara pasar una sola señal a la vez, en el momento<br />
en que se metan dos señales el motor dejara de funcionar, en el otro lado también se<br />
necesitaran 2 señales pero las señales serán personalizadas a cada motor lo que hará<br />
que puedan funcionar de manera independiente siempre y cuando reciban su impulso<br />
alto de voltaje.<br />
15