Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Los arreglos de puente H serán los siguientes:<br />
2.6 Switches y Palancas<br />
En esta parte asignaremos un switch o palanca en particular a cada arreglo de puente<br />
H que se llego a tener, estas palancas solo tendrán la función de ser los interruptores<br />
los cuales dejaran pasar la corriente directa a los mismos puentes H, estos se<br />
encargaran de encender los motores los cuales giraran en un sentido arbitrario<br />
dependiendo de que señales hayan recibido por los puentes H, una vez recibidas estas<br />
señales se podra mover una sección en particular o todo el manipulado.<br />
Generador<br />
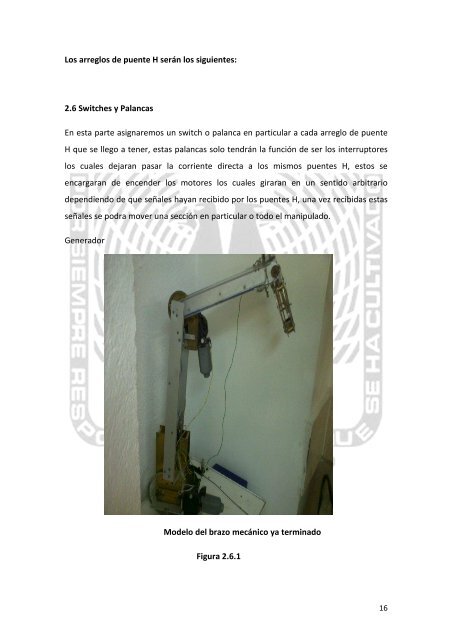
Modelo del brazo mecánico ya terminado<br />
Figura 2.6.1<br />
16