Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
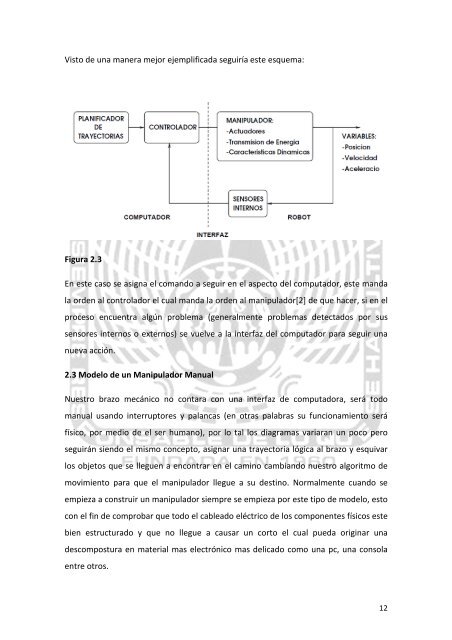
Visto de una manera mejor ejemplificada seguiría este esquema:<br />
Figura 2.3<br />
En este caso se asigna el comando a seguir en el aspecto del computador, este manda<br />
la orden al controlador el cual manda la orden al manipulador[2] de que hacer, si en el<br />
proceso encuentra algún problema (generalmente problemas detectados por sus<br />
sensores internos o externos) se vuelve a la interfaz del computador para seguir una<br />
nueva acción.<br />
2.3 Modelo de un Manipulador Manual<br />
Nuestro brazo mecánico no contara con una interfaz de computadora, será todo<br />
manual usando interruptores y palancas (en otras palabras su funcionamiento será<br />
físico, por medio de el ser humano), por lo tal los diagramas variaran un poco pero<br />
seguirán siendo el mismo concepto, asignar una trayectoria lógica al brazo y esquivar<br />
los objetos que se lleguen a encontrar en el camino cambiando nuestro algoritmo de<br />
movimiento para que el manipulador llegue a su destino. Normalmente cuando se<br />
empieza a construir un manipulador siempre se empieza por este tipo de modelo, esto<br />
con el fin de comprobar que todo el cableado eléctrico de los componentes físicos este<br />
bien estructurado y que no llegue a causar un corto el cual pueda originar una<br />
descompostura en material mas electrónico mas delicado como una pc, una consola<br />
entre otros.<br />
12