Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan
Brazo Robotico TC LIMI 2-09 - Campus Tlalpan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.2 Tipos de <strong>Brazo</strong>s Mecánicos<br />
Uno de los problemas clásicos en el diseño de brazos mecánicos es su peso, el cual<br />
genera un torque (fuerza angular) que debe ser soportado por motores, que a su vez<br />
tienen que tener fuerza adicional para soportar el torque, generado por el peso de un<br />
objeto que pueda sujetar. Por esta razón es que los brazos mecánicos se clasificaron en<br />
distintos modelos:<br />
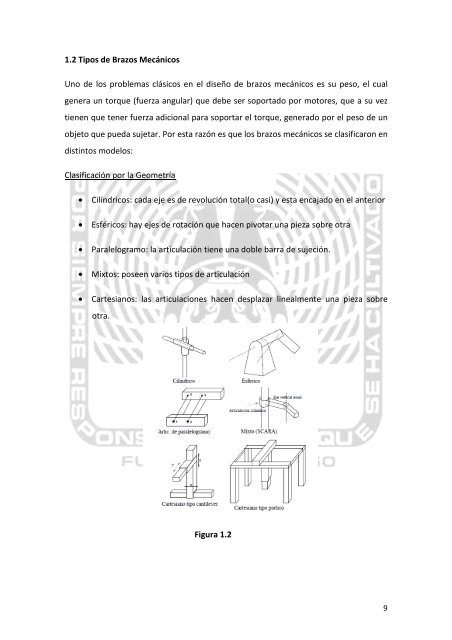
Clasificación por la Geometría<br />
• Cilíndricos: cada eje es de revolución total(o casi) y esta encajado en el anterior<br />
• Esféricos: hay ejes de rotación que hacen pivotar una pieza sobre otra<br />
• Paralelogramo: la articulación tiene una doble barra de sujeción.<br />
• Mixtos: poseen varios tipos de articulación<br />
• Cartesianos: las articulaciones hacen desplazar linealmente una pieza sobre<br />
otra.<br />
Figura 1.2<br />
9