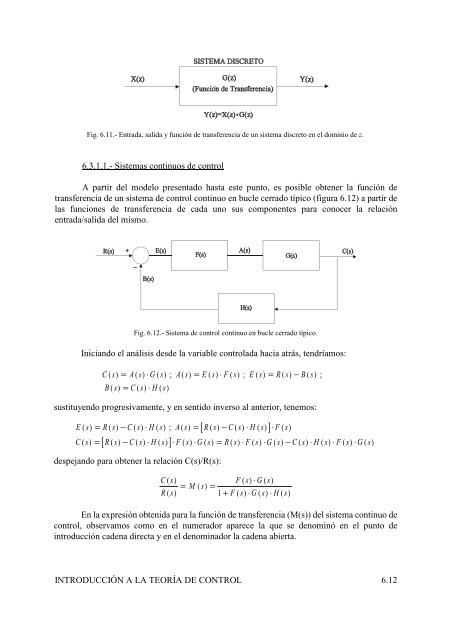
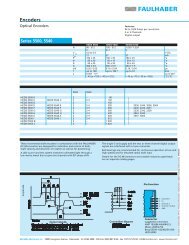
Fig. 6.11.- Entrada, salida y función de transferencia de un sistema discreto en el dominio de z.6.3.1.1.- Sistemas continuos de controlA partir del modelo presentado <strong>hasta</strong> este punto, es posible obtener la función detransferencia de un sistema de control continuo en bucle cerrado típico (figura 6.12) a partir delas funciones de transferencia de cada uno sus componentes para conocer la relaciónentrada/salida del mismo.Fig. 6.12.- Sistema de control continuo en bucle cerrado típico.Iniciando el análisis desde la variable controlada hacia atrás, tendríamos:C( s) = A( s) ⋅ G( s) ; A( s) = E ( s) ⋅ F ( s) ; E ( s) = R( s) − B( s);B( s) = C( s) ⋅H ( s)sustituyendo progresivamente, y en sentido inverso al anterior, tenemos:[ ][ ]E ( s) = R( s) −C( s) ⋅ H ( s) ; A( s) = R( s) −C( s) ⋅H ( s) ⋅F ( s)C( s) = R( s) −C( s) ⋅H ( s) ⋅F ( s) ⋅ G( s) = R( s) ⋅F ( s) ⋅G( s) −C( s) ⋅H ( s) ⋅F ( s) ⋅G( s)despejando para obtener la relación C(s)/R(s):C( s)R( s)F ( s) ⋅G( s)= M ( s)=1 + F ( s) ⋅G( s) ⋅H ( s)En la expresión obtenida para la función de transferencia (M(s)) del sistema continuo decontrol, observamos como en el numerador aparece la que se denominó en el punto deintroducción cadena directa y en el denominador la cadena abierta.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.12
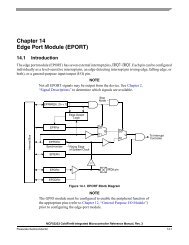
6.3.1.2.- Sistemas discretos de controlPara el cálculo de la función de transferencia (FDT) de un sistema de control discreto deprocesos continuos a partir de los diferentes bloques que lo constituyen, es necesario tener encuenta que el diagrama de bloques típico de un sistema de control realimentado continuo (Fig.6.12) varía ligeramente en el caso de sistemas discretos. Ello se deduce del hecho de que en unsistema discreto de control coexisten elementos continuos (planta a controlar), caracterizablesmediante la transformada de Laplace, con elementos discretos (controlador), caracterizablesmediante la transformada Z.En la práctica sucede, como ya se adelantó en el punto 6.2.7, que mientras la plantamodifica sus variables de forma continua en el tiempo y en su magnitud, el controlador sólo actúaen instantes discretos de tiempo y sólo es capaz de reconocer un número finito de valores en lasseñales que maneja. Si el sistema está bien dimensionado, ocurrirá que el número de instantesen los que actúa el controlador por unidad de tiempo es lo suficientemente elevado como paraque, entre cada dos instantes, la variable correspondiente no haya variado prácticamente nada(teorema de muestreo). De la misma forma, el número de valores significativos de la señal, hade ser tal, que sólo incluya la información realmente importante, es decir, la que aporta aspectosrelevantes sobre la variable o proceso a controlar. Todos estos aspectos y consideraciones, estánrecogidos en una teoría matemática relativa al procesado digital de señal, y que está dedicada aestablecer las condiciones bajo las que este tipo de sistemas debe ser dimensionado parafuncionar adecuadamente.Para poder conectar elementos discretos con elementos continuos en un sistema, se hacennecesarios unos componentes adicionales de carácter híbrido, es decir, que ante una señal deentrada continua proporcionan una secuencia de salida discreta y viceversa. En concreto, a laentrada de la planta se debe situar un elemento que transforme la salida discreta del reguladordiscreto en una señal continua inteligible por la planta. Por contra, antes de la entrada al reguladorse debe emplear otro elemento que transforme las señales de naturaleza continua generadas porla planta en una secuencia discreta. Al primero se le denomina bloqueador (B) y al segundomuestreador. Véase la figura 6.13, en la que a la señal continua se le ha denominado x(t),mientras que a su equivalente discreta, x k , donde k es el índice de la secuencia discreta que,tomando valores enteros 0, 1, 2, 3, ..., indica el número de orden de cada valor discretoconsiderado. La separación temporal entre cada dos valores de la secuencia, la marca elparámetro T o periodo de muestreo. La función del muestreador, en la práctica, vienedesempeñada por un conversor analógico/digital (ADC)Fig. 6.13.- Bloque muestreador en un sistema de control.En lo que respecta al otro elemento (bloqueador), su función la realiza típicamente unconversor digital/analógico (DAC) y su bloque quedaría definido tal como aparece en la figura6.14. La señal de entrada en este caso será la secuencia discreta y la salida una función continuadel tiempo.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.13