Tema 6: Desde pag.1 hasta pag.13
Tema 6: Desde pag.1 hasta pag.13
Tema 6: Desde pag.1 hasta pag.13
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
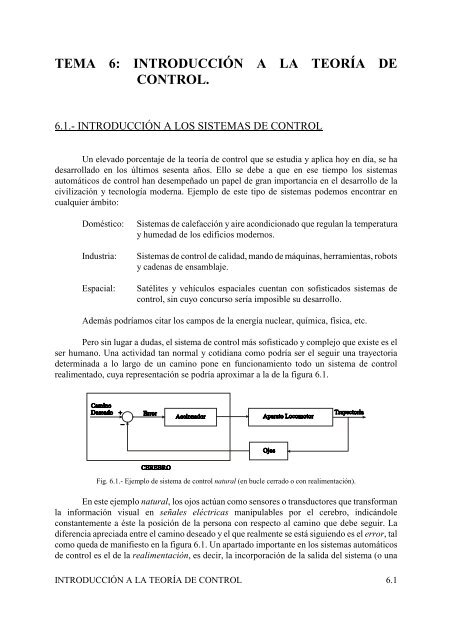
TEMA 6: INTRODUCCIÓN A LA TEORÍA DECONTROL.6.1.- INTRODUCCIÓN A LOS SISTEMAS DE CONTROLUn elevado porcentaje de la teoría de control que se estudia y aplica hoy en día, se hadesarrollado en los últimos sesenta años. Ello se debe a que en ese tiempo los sistemasautomáticos de control han desempeñado un papel de gran importancia en el desarrollo de lacivilización y tecnología moderna. Ejemplo de este tipo de sistemas podemos encontrar encualquier ámbito:Doméstico:Industria:Espacial:Sistemas de calefacción y aire acondicionado que regulan la temperaturay humedad de los edificios modernos.Sistemas de control de calidad, mando de máquinas, herramientas, robotsy cadenas de ensamblaje.Satélites y vehículos espaciales cuentan con sofisticados sistemas decontrol, sin cuyo concurso sería imposible su desarrollo.Además podríamos citar los campos de la energía nuclear, química, física, etc.Pero sin lugar a dudas, el sistema de control más sofisticado y complejo que existe es elser humano. Una actividad tan normal y cotidiana como podría ser el seguir una trayectoriadeterminada a lo largo de un camino pone en funcionamiento todo un sistema de controlrealimentado, cuya representación se podría aproximar a la de la figura 6.1.Fig. 6.1.- Ejemplo de sistema de control natural (en bucle cerrado o con realimentación).En este ejemplo natural, los ojos actúan como sensores o transductores que transformanla información visual en señales eléctricas manipulables por el cerebro, indicándoleconstantemente a éste la posición de la persona con respecto al camino que debe seguir. Ladiferencia apreciada entre el camino deseado y el que realmente se está siguiendo es el error, talcomo queda de manifiesto en la figura 6.1. Un apartado importante en los sistemas automáticosde control es el de la realimentación, es decir, la incorporación de la salida del sistema (o unaINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.1
función de ésta) a un punto anterior de la cadena. Nos podemos valer del mismo ejemplo paracomprender la importancia de la realimentación. En la figura 6.2 se puede apreciar la eliminacióndel bloque de realimentación con sus elementos asociados. En la realidad se trataría de tapar losojos a la persona bajo estudio.Fig. 6.2.- Ejemplo de sistema de control natural (en bucle abierto o sin realimentación).Ahora, mantener la trayectoria deseada y por tanto alcanzar el punto de destino final, sólose podrá conseguir estimando la posición, por lo que es fácil que se cometa un importante error.Ello se debe a la interrupción de la cadena de retorno, provocando que el sistema actúe en bucleabierto.En las dos figuras anteriores ya se ha presentado una de las formas más comunes derepresentación de los sistemas de control: el diagrama de bloques.En la figura 6.3 se muestra un elemento del diagrama de bloques. Las flechas indican queel bloque es unidireccional, de forma que las señales sólo circulan en el sentido indicado por lasflechas. La ventaja del concepto de diagrama de bloques radica en el hecho de que los sistemasestán compuestos por varios elementos independientes cuyas caracterizaciones pueden hacerseindividualmente.Fig. 6.3.- Elemento de un diagrama de bloques.Los diagramas de bloques son una forma sencilla de mostrar las relaciones funcionalesde los diversos componentes y revela el funcionamiento del sistema más fácilmente que laobservación directa del propio sistemas físico. Un aspecto importante del diagrama de bloques,es la posibilidad de apreciar la similitud entre diferentes tipos de sistemas, permitiendo con elloobservar como, sistemas físicos aparentemente distintos, pueden ser analizados con las mismastécnicas y que sistemas, aparentemente sin relación, pueden ser representados por el mismodiagrama de bloques.La figura 6.4 representa el diagrama de bloques de un sistema de control típico. La salidaC, señal que se pretende controlar, se realimenta a un punto, donde se le compara con la entradade referencia R, señal deseada para el sistema.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.2
R+_BEFAGCHMFig. 6.4.- Diagrama de bloques de un sistema de control típico.Cada uno de los bloques y puntos de un diagrama de bloques está vinculado a unaterminología, la cual vamos a empezar a conocer con la ayuda de esta figura y siguientes. Así,tenemos:R: Entrada de referenciaC: Señal de salida (variable controlada)B: Señal de realimentaciónE: Señal de errorA: Señal accionadora o activaH: Cadena de retorno o realimentaciónG: Planta o proceso a controlarF: Regulador o controladorFG: Cadena directaFGH: Cadena abiertaM: Cadena cerradaPara aclarar y comprender mejor el significado de cada uno de los bloques constituyentesde un sistemas de control típico como el de la figura 6.4, se añaden dos ejemplos de sistemas decontrol electrónicos.El primero podría ser un sistema que controlara la temperatura de una habitación. Paraeste caso la señal de entrada R sería la temperatura deseada. La planta o proceso a controlar (G)sería la caldera que calienta la habitación y más concretamente su aspecto termodinámico. Laseñal de salida C, sería la temperatura real de la habitación. El bloque F estaría integrado porunos determinados subsistemas (circuitos electrónicos) que se encargarían de trataradecuadamente la señal de error E antes de inyectarla a la planta. Por último, H sería el elementotransductor que genera una señal eléctrica adecuada en función de la temperatura real que se tieneen la habitación.Otro caso podría ser el control de la posición de un brazo robotizado. En este caso cadamotor implicado en las articulaciones del brazo estará controlado por un bloque como el de lafigura 6.4. La señal R será la posición deseada para cada articulación, C la posición real dondese encuentre en cada instante la articulación, el bloque G sería el motor, F los amplificadoresadecuados y H un sensor de posición.Sin embargo, el modelo representado en la figura anterior, al ser básico, no incluye todoslos elementos que pueden aparecer en las representaciones correspondientes a sistemas de controlINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.3
más sofisticados. Esencialmente, estos sistemas de control suelen contar con un mayor númerode nudos y bifurcaciones, por lo que nos podríamos encontrar una diversidad de estos, tal comoaparece en la figura 6.5.Fig. 6.5.- Diagrama de bloques de un sistema de control. Nudos y bifurcaciones.Aprovechando el modelo representado en dicha figura, podemos resumir las reglas querigen los diagramas de bloques de los sistemas de control:a) Cada componente o bloque de un sistema se representará por un rectángulo, donde seindicarán las variables de entrada y salida y su relación, expresada por una función detransferencia. A título de ejemplo, en la figura 6.6 podemos ver una serie de bloquesrepresentativos de los componentes básicos de sistemas eléctricos y mecánicos.Fig. 6.6.- Representación de bloques de algunos componentes eléctricos y mecánicos.b) La relación salida-entrada de cada bloque se denomina función de transferencia delmismo y define totalmente su comportamiento si se conoce su estado inicial y susentradas.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.4
c) Un sistema completo vendrá representado, en general, por un diagrama compuesto devarios bloques interconectados entre sí mediante nudos y bifurcaciones, tal como semuestra en la figura 6.5. Cada bloque podrá corresponder a un componente o a una partedel sistema más o menos compleja.d) Los nudos son puntos donde se efectúa una operación entre dos o más variables. Enel caso más frecuente, en un nudo se suman o se restan dos variables, distinguiéndoseentonces dos tipos: nudos aditivos y diferenciales. Podemos encontrar además nudosmultiplicadores y divisores.e) Las bifurcaciones son puntos en los que una misma variable se desdobla en variasramas que van a un bloque o a un nudo, tal como queda también indicado en la figura 6.5.f) Pueden asociarse dos o más bloques para obtener una representación más simplificadade un sistemas de control, o también, subdividir bloques para obtener una representacióncon mayor detalle. Ambos procesos se basan en ciertas reglas de operación de lasfunciones de transferencia, que se verán en apartados posteriores.Se puede observar como este modelo de sistema de control (diagrama de bloques) esválido para cualquier tipo de componente, dispositivo o subsistema, mientras se conozca larelación funcional entre la magnitud de salida que nos interese y las magnitudes de entrada delas que depende. Cumple, por tanto, uno de los requisitos exigidos a cualquier modelo, que esel de ser independiente de la forma constructiva y de la tecnología empleada en la fabricacióndel componente o dispositivo.6.2.- TIPOS DE SISTEMAS DE CONTROLAunque a lo largo del punto anterior se han citado algunos tipos de sistemas de control,en este punto vamos a definirlos de forma más concreta y profunda, comenzando por la propiadefinición de sistema de control: conjunto de componentes físicos conectados de tal manera quepueda regularse a sí mismo o a otro sistema.Se pueden distinguir varias clasificaciones posibles en los sistemas de control, en funciónde una serie de criterios. La primera que cabría hacer vendría dada en función de la formageneral del diagrama de bloques del sistema. En este sentido ya se ha esbozado la distinción enel punto de introducción, cuando se habló del sistema de control de la trayectoria de una personacon los ojos tapados o sin tapar. Así se tendrían los sistemas de control en lazo abierto (figura6.2) en los que no existe cadena de realimentación y sistemas de control en lazo cerrado, en losque sí existe (figura 6.1).6.2.1.- SISTEMAS DE CONTROL DE LAZO ABIERTOEs el sistema de control o de mando más sencillo y económico. El ajuste de un sistemaen cadena abierta depende del criterio y estimación del diseñador. Considerando el sistema decalefacción doméstica, la caldera estaría equipada únicamente con un sistema de relojería queINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.5
determina los periodos de conexión y desconexión de la misma. Entonces, para regular latemperatura, el encargado debe estimar el tiempo que la caldera ha de funcionar para lograr latemperatura deseada y fijarlo en el mecanismo de tiempo. Cuando ha transcurrido el tiempopredeterminado, la caldera se apaga automáticamente.Es bastante probable que la temperatura de la sala haya quedado por encima o por debajodel valor deseado. Así, es evidente que este tipo de sistemas de mando resulta impreciso. Unade las causas de su imprecisión puede ser el desconocimiento de las características exactas de lacaldera. Otra, en el hecho de no poder actuar sobre la temperatura exterior que influye en la delinterior de la sala. Por tanto, otra desventaja importante de los sistemas de bucle abierto es queno se adaptan a las variaciones de las condiciones ambientales, o sea, a las perturbacionesexteriores. El diagrama de bloques de un sistema de control de lazo abierto es el de la figura 6.3.En estos sistemas, para cada entrada de referencia corresponde una condición de operación fija.Así, la exactitud del sistema depende de la calibración. En presencia de perturbaciones unsistema de lazo abierto no cumple su función asignada.6.2.2.- SISTEMAS DE CONTROL DE LAZO CERRADOUn sistema de control de lazo cerrado es aquel en que la señal de salida tiene efectodirecto sobre la acción de control, esto es, son sistemas de control realimentado. La señal deerror actuante, que es la diferencia entre la señal de entrada y la de realimentación (que puede serla señal de salida o una función de la señal de salida y sus derivadas), entra al detector ocontrolador para reducir el error y llevar la salida del sistema al valor deseado. La figura 6.4muestra la relación entrada-salida de un sistema de control de lazo cerrado. En la mayoría de loscasos suele modelarse el sistema de forma que la señal de salida llega directamente alcontrolador, sin que el elemento de medida influya en la misma (realimentación unitaria), porejemplo incluyéndolo en la cadena directa y tomando como variable controlada la salida delmismo. Sería el caso representado en la figura 6.7Fig. 6.7.- Diagrama de bloques de un sistema de control de lazo cerrado con realimentación unitaria.Un sistema de cadena cerrada (lazo cerrado) proporciona un control más preciso que otroen cadena abierta (lazo abierto), sin embargo, puede resultar inestable si no está bien diseñado.Por ejemplo, si la ganancia es demasiado elevada, es posible que se produzca en el sistema una“sobrecorrección de error” que provoque una oscilación creciente de salida. Un sistema que seainestable resulta totalmente inútil.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.6
Otra clasificación de los sistemas de control sería aquella que se basa en su filosofía defuncionamiento, dando lugar en este caso a los sistemas de regulación y servosistemas.6.2.3.- SISTEMAS DE REGULACIÓNSon sistemas en los que la señal de entrada (referencia) es constante y las variaciones dela señal de salida a controlar o regular, se producen por alteraciones en la carga del sistema. Unejemplo de este tipo de sistemas de control sería el de control de temperatura de una habitaciónen la cual la carga estaría representada por todos los motivos que ocasionan pérdidas detemperatura (variable de salida a controlar). Para este tipo de sistemas, la señal de entrada sueledenominarse punto de consigna.6.2.4.- SERVOSISTEMASUn servosistema es un tipo de sistema de control en el que, en estado de funcionamientonormal, la variable de entrada está variando con el tiempo. A dicha variable se le sueledenominar señal de referencia. Dentro de los servosistemas encontramos un caso particular, elservomecanismo: servosistema en el que la variable controlada es una posición mecánica.Ejemplos de servomecanismos podrían ser el brazo robotizado citado en el punto de introducción(6.1) y el servofreno de un vehículo.Por último, ante la generalización en el uso de la palabra servomecanismo y su aplicacióna cualquier sistema de control automático, hay que dejar claro que: el servomecanismo es un casoparticular de servosistema y éste a su vez, lo es del sistema de control.La siguiente clasificación que se puede hacer de los sistemas de control es atendiendo asu comportamiento, dando lugar en este caso a los sistemas lineales y no lineales.6.2.5.- SISTEMAS LINEALESEn estos sistemas las ecuaciones matemáticas que rigen su comportamiento sondiferenciales lineales de coeficientes constantes. Esto supone que si introducimos al sistema unaseñal de entrada combinación lineal de otras dos, la salida es la misma combinación lineal de lasrespuestas individuales de dicho sistema a cada entrada por separado (propiedad desuperposición). Esta propiedad simplifica notablemente el análisis del sistema.Estrictamente hablando, los sistemas lineales no existen ya que todos los sistemas físicos,en la práctica, resultan ser no lineales en algún sentido. Por esto, los sistemas lineales sonsistemas ideales empleados solamente para facilitar el análisis y el proyecto. Todos los sistemasde control que estudiemos en este tema se considerarán lineales si explícitamente no se indicalo contrario.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.7
6.2.6.- SISTEMAS NO LINEALESEstos sistemas no cumplen la propiedad de superposición citada anteriormente. La nolinealidad (presente en todos los sistemas) de un sistema suele manifestarse en situacionesextremas, provocadas normalmente cuando las señales de entrada sobrepasan un determinadomargen o cuando la carga del sistema se sale fuera de los límites establecidos. En ambos casosse hace trabajar a determinados componentes del sistema en su zona no lineal provocando conello la no linealidad del conjunto del sistema, siendo necesario en este caso estudiarlo como tal.Ejemplos de sistemas no lineales podrían ser los servoamplificadores electrónicos y losservomotores. Los primeros presentan normalmente un efecto de saturación cuando la señalamplificada se hace excesiva. Los segundos presentan su saturación en los circuitos magnéticosinternos.Existen también otras alinealidades que afectan a componentes o sistemas de controlespecíficos: las holguras en los engranajes, los efectos de histéresis, etc.La última clasificación de los sistemas de control está hecha desde el punto de vista dela planta o proceso a controlar; en este caso se tendría sistemas de control de procesos continuosy sistemas de control de procesos discretos.6.2.7.- SISTEMAS DE CONTROL DE PROCESOS CONTINUOSAntes de entrar en el desarrollo de este punto convendría hacer una pequeña introduccióna los sistemas y señales que manejan para comprender mejor sus aplicaciones.Un sistema de señales continuas es aquel en el que todas las señales que intervienen sonfunciones continuas de la variable tiempo, t. Por contra, en los sistemas de señales discretas, laseñal, tiene forma de pulsos, ya que varía en determinados instantes de tiempo únicamente.Además, los sistemas de señales continuas (sistemas continuos) manejan señales que, dentro deunos márgenes, pueden tomar cualquier valor y se implementan en base a sistemas analógicos.Los sistemas de señales discretas (sistemas discretos) reales tienen limitado el número de valoresposibles de sus señales y se realizan a partir de tecnologías digitales.Una vez hecha esta breve introducción, diremos que los sistemas de control de procesoscontinuos pueden subdividirse en sistemas de control continuo o analógico de procesoscontinuos y sistemas de control discreto o digital de procesos continuos.Sistemas de control continuo de procesos continuosEn esos sistemas todas las señales implicadas son continuas o analógicas y todoslos subsistemas son analógicos. Como ejemplo, piénsese en el caso de sistemas de control detemperatura de una habitación en su versión más clásica.Sistemas de control discreto de procesos continuosPara este tipo de sistemas, a pesar de que el proceso a controlar es continuo, elsistema de control asociado al mismo no lo es. Es decir, que el sistema de control sólo actuaráen determinados instantes de tiempo y sólo podrá considerar, realmente, valores discretos de lasINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.8
señales implicadas. Como ejemplo de aplicación puede estudiarse el mismo caso anterior perocon el sistema de control discreto; las señales de temperatura aquí implicadas, como puedeintuirse, no variarán en gran medida en fracciones de tiempo pequeñas, por ejemplo de unsegundo. De esta manera, sería posible pensar en un sistema de control que solamentecomprobase la temperatura de la habitación una vez cada medio segundo y que actuase enconsecuencia en esos instantes. Además, aunque dicho sistema sólo pudiese detectar y manipularvariaciones de temperatura de 0'5(C, no parece descabellado pensar que el sistema podríafuncionar razonablemente bien. De esta manera se han sentado las bases de funcionamiento delos sistemas de control basados en microprocesador digital. Estos sistemas, con todas las ventajasque aporta la tecnología digital sobre la analógica, van implantándose cada vez con mayorprofusión. En cualquier caso, ha de tenerse en cuenta que en determinadas circunstancias puederesultar más ventajosa la utilización de sistemas de control continuo ya que la implementaciónde sistemas de control discreto ofrece un grado de dificultad, prácticamente constante eindependiente del número de procesos o plantas a controlar. La figura 6.8 puede ayudarnos acomprender esta disyuntiva.Fig. 6.8.- Gráfica comparativa para la implementación de sistemas de control continuo o discreto.6.2.8.- SISTEMAS DE CONTROL DE PROCESOS DISCRETOSEn este caso, las plantas o procesos implicados varían sus características y estados deforma discreta. Ejemplos de este tipo de procesos, podrían ser: un ascensor, cuyos estado sonclaramente limitados (subir, bajar, parado, abrir puertas, etc.); un cruce de semáforos (verde, rojoy ámbar, por el número de semáforos que haya). En estos ejemplos los sistemas de control sontambién discretos y sus técnicas de manejo, modelado e implementación son bastante diferentesa los anteriores.6.3.- MODELO DE SISTEMAS DE CONTROLEl análisis de los sistemas de control permite estimar a priori como éstos van acomportarse ante diversas situaciones de su entorno, pudiendo de esta forma saber si van asatisfacer las especificaciones que se le impongan.Se trata de una labor necesaria, tanto como paso previo a la implementación de sistemasINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.9
de control, como para su modificación, ajuste o rediseño.Para proceder al citado análisis no es necesario disponer físicamente del sistema encuestión , sino que basta con tener un modelo matemático del mismo. Para la elección de dichomodelo se manejan muchas posibilidades, aunque siempre se debe tener en cuenta una relaciónde compromiso según la cual, cuanto más preciso es el modelo, más complejo y difícil demanejar resulta y viceversa, cuanta menos precisión se necesite, más sencillo puede ser el modelomatemático que represente al sistema de control. Teniendo en cuenta este compromiso y segúnel tipo de sistema y especificaciones de que se disponga, pueden utilizarse diferentes métodosde modelado (funciones de transferencia, variables de estado 1 , etc.) o diferentes métodos deanálisis (análisis temporal, frecuencial, lugar de raíces, etc.).Evidentemente, toda persona vinculada al mundo del control debe conocer losfundamentos matemáticos que respalden tanto los métodos de modelado como los métodos deanálisis de los sistemas de control (teoría clásica de control). En la práctica y a raíz de laaparición y proliferación de programas informáticos de análisis y diseño de sistemas de control(CC, MATLAB, MATRIX, etc.), la aplicación de los algoritmos matemáticos se simplificanenormemente, convirtiéndose en un proceso más o menos mecánico y sencillo.6.3.1.- FUNCIÓN DE TRANSFERENCIA DE SISTEMAS DE CONTROLAtendiendo a la teoría de control clásico para el modelado de sistemas de control con unavariable de entrada (variable de referencia) y otra de salida (variable controlada), se utilizan lasllamadas funciones de transferencia para su representación y expresar su relación. Como ya seha mencionado anteriormente, debe existir un compromiso entre exactitud o fidelidad en larepresentación matemática de los sistemas y simplicidad en su manejo. El equilibrio óptimo eneste compromiso depende de las exigencias de la aplicación que se esté tratando de analizar.Normalmente, el buscar un ajuste muy fino en la obtención de la función matemática detransferencia de un sistema conlleva un aumento en la precisión y número de coeficientes de lafunción, lo cual no siempre está justificado.La función de transferencia de un sistema de control realimentado se obtiene a partir delas funciones de transferencia de cada uno de los bloques que lo constituyen. En la mayoría delos casos, la función de transferencia de la planta a controlar (G) es suministrada por el fabricantede la misma o, en su defecto, puede estimarse aplicando diversos algoritmos matemáticos máso menos ajenos a la teoría de control. Sin embargo, el proceso de obtención de la función detransferencia del regulador (F) pasa por la aplicación de técnicas de diseño de sistemas de controlde cara a la consecución de unas determinadas especificaciones de funcionamiento, ya queposteriormente, esta función de transferencia F ha de llevarse a la práctica mediante técnicasanalógicas o digitales. En general, la implementación de reguladores discretos es mucho mássencilla que la correspondiente a reguladores continuos, por lo que en este último caso se empleaun número limitado de tipos de funciones de transferencia, bien conocidas, como los reguladoresPID, por ejemplo.1 Método de análisis y síntesis de sistemas en tiempo discreto, mediante el cual se modela un sistema. Las variables de estadodescriben totalmente la dinámica del sistema y representan la mínima cuantía de información que es necesaria para determinar los estadosfuturos y las salidas del sistema para unas funciones de entrada dadas (vectores).INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.10
La función de transferencia de un sistema pretende ser una representación matemática,sencilla y cómoda de manejar, que caracteriza la relación existente entre la salida y la entrada delmismo. Esta relación puede resultar tan simple como que la salida de un sistema puede calcularsemultiplicando la entrada por la función de transferencia (veáse figura 6.9). De esta forma, sepuede conocer rápidamente las formas de respuesta de los sistemas ante cualquier entradaconocida, siempre que se tenga su función de transferencia.Fig. 6.9.- Función de transferencia de un sistema.Sin embargo, de esta forma el problema se traslada a las expresiones de entrada y salidade los sistemas ( X e Y en la figura anterior). Según se comentó anteriormente, existen técnicasde análisis temporal, con las que se analiza la evolución de las señales de salida de los sistemasa lo largo del tiempo, y técnicas de análisis frecuencial, con las que se analiza la respuesta de lossistemas para diferentes frecuencias de variación de las señales que procesa. Para el primer caso,lo más lógico sería trabajar, pues, con señales o funciones del tiempo a la entrada y a la salidade los sistemas (x(t) e y(t), respectivamente), sin embargo en esa situación no se cumple larelación entrada/salida planteada en la figura anterior. Para que ello sea así, es necesario expresarlas señales de entrada y salida en un formato transformado, que cambia la variable tiempo (t) porotra, más cercana al dominio de la frecuencia. Si se trata de sistemas continuos se emplea lavariable s, obtenida a partir del tiempo t mediante la transformada de Laplace, mientras que parasistemas discretos se utiliza la variable z, obtenida aplicando la transformada Z sobre lasexpresiones en el tiempo discreto.Por tanto, utilizando las transformadas de las señales de entrada y salida, la relación queentre ellas se ilustraba en la figura 6.9 tiene ya sentido. Lógicamente, para asegurar lahomogeneidad en la expresión y según el tipo de sistema de que se trate, continuo o discreto, lasfunciones de transferencia de los mismos ha de utilizar como variable la s o la z respectivamente.Así, quedaría una situación como la que se muestra en las figuras 6.10 y 6.11 para los casoscitados.Fig. 6.10.- Entrada, salida y función de transferencia de un sistema continuo en el dominio de Laplace (s).INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.11
Fig. 6.11.- Entrada, salida y función de transferencia de un sistema discreto en el dominio de z.6.3.1.1.- Sistemas continuos de controlA partir del modelo presentado <strong>hasta</strong> este punto, es posible obtener la función detransferencia de un sistema de control continuo en bucle cerrado típico (figura 6.12) a partir delas funciones de transferencia de cada uno sus componentes para conocer la relaciónentrada/salida del mismo.Fig. 6.12.- Sistema de control continuo en bucle cerrado típico.Iniciando el análisis desde la variable controlada hacia atrás, tendríamos:C( s) = A( s) ⋅ G( s) ; A( s) = E ( s) ⋅ F ( s) ; E ( s) = R( s) − B( s);B( s) = C( s) ⋅H ( s)sustituyendo progresivamente, y en sentido inverso al anterior, tenemos:[ ][ ]E ( s) = R( s) −C( s) ⋅ H ( s) ; A( s) = R( s) −C( s) ⋅H ( s) ⋅F ( s)C( s) = R( s) −C( s) ⋅H ( s) ⋅F ( s) ⋅ G( s) = R( s) ⋅F ( s) ⋅G( s) −C( s) ⋅H ( s) ⋅F ( s) ⋅G( s)despejando para obtener la relación C(s)/R(s):C( s)R( s)F ( s) ⋅G( s)= M ( s)=1 + F ( s) ⋅G( s) ⋅H ( s)En la expresión obtenida para la función de transferencia (M(s)) del sistema continuo decontrol, observamos como en el numerador aparece la que se denominó en el punto deintroducción cadena directa y en el denominador la cadena abierta.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.12
6.3.1.2.- Sistemas discretos de controlPara el cálculo de la función de transferencia (FDT) de un sistema de control discreto deprocesos continuos a partir de los diferentes bloques que lo constituyen, es necesario tener encuenta que el diagrama de bloques típico de un sistema de control realimentado continuo (Fig.6.12) varía ligeramente en el caso de sistemas discretos. Ello se deduce del hecho de que en unsistema discreto de control coexisten elementos continuos (planta a controlar), caracterizablesmediante la transformada de Laplace, con elementos discretos (controlador), caracterizablesmediante la transformada Z.En la práctica sucede, como ya se adelantó en el punto 6.2.7, que mientras la plantamodifica sus variables de forma continua en el tiempo y en su magnitud, el controlador sólo actúaen instantes discretos de tiempo y sólo es capaz de reconocer un número finito de valores en lasseñales que maneja. Si el sistema está bien dimensionado, ocurrirá que el número de instantesen los que actúa el controlador por unidad de tiempo es lo suficientemente elevado como paraque, entre cada dos instantes, la variable correspondiente no haya variado prácticamente nada(teorema de muestreo). De la misma forma, el número de valores significativos de la señal, hade ser tal, que sólo incluya la información realmente importante, es decir, la que aporta aspectosrelevantes sobre la variable o proceso a controlar. Todos estos aspectos y consideraciones, estánrecogidos en una teoría matemática relativa al procesado digital de señal, y que está dedicada aestablecer las condiciones bajo las que este tipo de sistemas debe ser dimensionado parafuncionar adecuadamente.Para poder conectar elementos discretos con elementos continuos en un sistema, se hacennecesarios unos componentes adicionales de carácter híbrido, es decir, que ante una señal deentrada continua proporcionan una secuencia de salida discreta y viceversa. En concreto, a laentrada de la planta se debe situar un elemento que transforme la salida discreta del reguladordiscreto en una señal continua inteligible por la planta. Por contra, antes de la entrada al reguladorse debe emplear otro elemento que transforme las señales de naturaleza continua generadas porla planta en una secuencia discreta. Al primero se le denomina bloqueador (B) y al segundomuestreador. Véase la figura 6.13, en la que a la señal continua se le ha denominado x(t),mientras que a su equivalente discreta, x k , donde k es el índice de la secuencia discreta que,tomando valores enteros 0, 1, 2, 3, ..., indica el número de orden de cada valor discretoconsiderado. La separación temporal entre cada dos valores de la secuencia, la marca elparámetro T o periodo de muestreo. La función del muestreador, en la práctica, vienedesempeñada por un conversor analógico/digital (ADC)Fig. 6.13.- Bloque muestreador en un sistema de control.En lo que respecta al otro elemento (bloqueador), su función la realiza típicamente unconversor digital/analógico (DAC) y su bloque quedaría definido tal como aparece en la figura6.14. La señal de entrada en este caso será la secuencia discreta y la salida una función continuadel tiempo.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.13
Fig. 6.14.- Bloque bloqueador en un sistema de control.Así, teniendo en cuenta todo lo comentado, el diagrama de bloques de un sistema discretoy realimentado de control de un proceso continuo, puede tener varias modalidades, las cualesaparecen reflejadas en las figuras 6.15, 6.16 y 6.17, cuya diferencia radica, básicamente, en lasfunciones que realiza el procesador discreto del sistema, quedando el resto de los bloquescondicionados por este hecho.En la figura 6.15, el procesador discreto se encarga de generar la señal de referencia delsistema R(z), compararla con la señal de realimentación discretizada B(z) y generar la acción decontrol a través del regulador F(z).Fig. 6.15.- Primer modelo de un sistema discreto y realimentado de control de un proceso continuo.Sin embargo, en la figura 6.16, la señal de referencia R(s) es generada de forma continuadesde el exterior del procesador, por lo que es necesario muestrearla con el mismo periodo T conel que se genera la secuencia de entrada al procesador desde la línea de realimentación B(z). Elprocesador es este caso ya sólo efectúa la comparación y la regulación.Fig. 6.16.- Segundo modelo de un sistema discreto y realimentado de control de un proceso continuo.Finalmente, en la figura 6.17, el procesador únicamente se encarga de realizar laregulación mediante el controlador discreto F(z), siendo continuo el comparador.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.14
Fig. 6.17.- Tercer modelo de un sistema discreto y realimentado de control de un proceso continuo.Se puede observar como, en todos los casos, la posición de los bloques muestreador(ADC) y bloqueador (DAC) es siempre aquella en la que separan adecuadamente la parte discreta(variable z) de la parte continua (variable s) del sistema. En muchos casos, por simplificación,el elemento transductor H(s) puede considerarse como parte de la planta G(s), en cuyo caso secontrola realmente la salida de aquel y no de ésta, de forma que la realimentación resulta unitaria(H(s) = 1).Para el cálculo de la función de transferencia de un sistema discreto, se propone unmétodo que considera el sistema con entrada y salida discretas, por lo que el diagrama de bloquesde la figura 6.15 es el más adecuado. Obsérvese como en dicha figura se ha añadido unmuestreador a la salida del sistema, que tiene únicamente un sentido matemático (no aparecerealmente en el sistema físico). Trabajando de esta forma la función de transferencia global seráuna función de z y sólo permitirá conocer la salida del sistema en los instantes de muestreo(separados T segundos), de ahí la existencia de ese muestreador ficticio. En cualquier caso, si elperiodo de muestreo T es adecuado, dicho conocimiento será suficiente para caracterizar elsistema.Como paso previo al cálculo de la función de transferencia global del sistema, en z, se hade hallar un equivalente discreto de los bloques continuos, es decir, de un bloque que procesaseñales continuas se ha de obtener un equivalente que procese secuencias discretas. Ello puedelograrse considerando las estructuras de las figura 6.18 y 6.19 dentro del sistema de la figura 6.15.Efectivamente, considerando un bloqueador a la entrada de la parte continua y unmuestreador a la salida, se obtendrá un sistema discreto equivalente al continuo correspondiente.De esta forma y a partir de una algoritmo matemático contemplado en cualquier programa CADpara sistemas de control, se puede hallar una función de transferencia en z para las estructurasanteriores. Esta operación suele venir descrita en dichos programas bajo los nombres de:discretización, equivalente z, s z, etc.En la figura 6.18 se muestra la caracterización de la planta (continua, G(s)) con sufunción de transferencia en z, obteniéndose un “nuevo” nombre para ella, BG(z), que nos dicesu procedencia u origen en el dominio continuo.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.15
Fig. 6.18.- Obtención del equivalente discreto de un bloque continuo.Para simplificar el proceso operativo (análisis, principalmente) sobre el sistema, muchasveces suele incluirse el bloque de realimentación en la cadena directa, con lo que la discretizaciónabarcará en este caso a los dos bloques, tal como se muestra en la figura 6.19. Esta operación sehará siguiendo las reglas oportunas para este tipo de transformaciones.Fig. 6.19.- Discretización conjunta de los bloques continuos G(s) y H(s) en un sistema.Una vez que se han caracterizado todos los bloques del sistema con su función detransferencia en z, el cálculo de la función global se realiza de forma similar a como se hizo paralos sistemas continuos en el punto 6.3.1.1., resultando por tanto la siguiente expresión:C( z)R( z)F ( z) ⋅ BG( z)= M ( z)=1 + F ( z) ⋅BGH ( z)6.4.- ANÁLISIS TEMPORAL DE SISTEMAS CONTINUOS DE CONTROLLa respuesta de un sistema de control, depende fuertemente de la señal de control oaccionadora (A(s), figura 6.12), la cual es proporcionada por el regulador o controlador (F(s),figura 6.12). Por tanto, para conseguir un adecuado comportamiento del sistema o para mejorarel ya establecido, se debe diseñar y elegir adecuadamente el regulador F.Como ya se comentó anteriormente, de entre las diversas técnicas utilizables para elanálisis y diseño de sistemas de control, una de las más inmediatas es la que se basa en el estudiodel comportamiento de los mismos a lo largo del tiempo. Tomando como base de partida elmodelo matemático de los sistemas basado en las funciones de transferencia (FDT) ytransformadas, el proceso partiría del conocimiento de la FDT del sistema en cuestión y de latransformada correspondiente (Laplace para sistemas continuos) de la señal de entrada. Acontinuación, se halla la salida del sistema (en el dominio transformado) para, a través de latransformada inversa, calcular la expresión de esta en el dominio del tiempo, lo cual permitiráextraer conclusiones. Dicho proceso queda resumido en la figura 6.20.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.16
Fig. 6.20.- Proceso de obtención de la respuesta temporal de un sistema continuo.Sin embargo, el procedimiento anterior no es necesario aplicarlo en su totalidad en lamayoría de los casos, debido a que desde el dominio transformado se pueden extraer conclusionesacerca de la respuesta temporal de los sistemas. Esto se debe principalmente a dos motivos: eldominio que se tiene ya de esta materia y la utilización de paquetes informáticos para análisis ydiseño de sistema de control.Así, de acuerdo con el primer motivo mencionado, es común la utilización de señales deprueba determinadas para la caracterización de la respuesta temporal de los sistemas. Las másutilizadas son el escalón y la rampa (figura 6.21), o combinaciones de ellas. Este tipo de señalesaparecen con frecuencia en el funcionamiento normal de diversos tipos de servomecanismos ysistemas de regulación de determinadas variables físicas.Fig. 6.21.- Señales de prueba en los sistemas de control.Las transformadas de Laplace, a partir de su expresión temporal, para estas señales serían:Escalon:Rampa:1r( t) = 1, ∀ t> 0 ⇒ R( s)=s1r( t) = t, ∀ t> 0 ⇒ R( s)=2sAl ser la estabilidad del sistema uno de los aspectos fundamentales que se debe estudiarde estos, las señales de prueba tiene un importante papel en este estudio. Efectivamente, alintroducir las señales de prueba al sistema, éste pasará unos instantes tratando de adecuar la salidaa las exigencias de estas entradas, tendiendo a hacer lo más pequeño posible el error o diferenciaentre ambas señales. Para ello y, según que regulador se utilice, existe la posibilidad de que laINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.17
señal de salida oscile en torno al valor de referencia de forma amortiguada con el tiempo (figura6.22a) o no (figura 6.22b). En caso de que las oscilaciones no se amortigüen, es decir, nodesaparezcan con el tiempo, el sistema será inestable y, por consiguiente, inservible con elregulador utilizado. Si por el contrario, las oscilaciones disminuyen con el tiempo, o incluso noaparecen, el sistema será estable. Cuanto más pequeñas sean estas sobreoscilaciones más estableserá el sistema, por lo que el diseño de los reguladores deberá ir encaminado en este sentido.Fig.6.22.- Formas de respuesta de un sistema entre rampa y ecalón.Transcurrido el tiempo de establecimiento (régimen transitorio de la respuesta), la señalde salida (ante las entradas de prueba) se estabiliza a una determinada distancia (error) de la deentrada. A partir de este instante se entra en el régimen permanente de respuesta (figura 6.22),caracterizado por el error en régimen permanente. A pesar de estos criterios prácticos, deberecordarse que la definición matemática de régimen permanente establece que éste ha deconsiderarse cuando el tiempo tiende a infinito.6.4.1.- ANÁLISIS TEMPORAL EN RÉGIMEN PERMANENTEPara el estudio del error en régimen permanente o precisión de los sistemas realimentadosde control, existe toda una teoría matemática establecida que, partiendo del conocimiento de laFDT de la cadena directa del sistema y considerando realimentación unitaria, permite una rápidacaracterización de esta parte de la respuesta temporal.En un sistema tipo como el de la figura 6.23, en el que la realimentación es unitaria ydonde G(s) es la FDT de la cadena directa, la señal E(s) es la diferencia entre la entrada y la salidadel sistema, es decir, el error. Aplicando las relaciones existentes entre las diversas variablesimplicadas es fácil obtener su expresión matemática en el dominio transformado de Laplace.Fig. 6.23.- Modelo de sistema continuo tipo para el cálculo de errores.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.18
E ( s)= + 1R( s)G( s)A partir de la expresión anterior y aplicando el teorema del valor final de la transformadade Laplace, se puede hallar el error en régimen permanente:s⋅R( s)erp= lim e( t) = lim [ s⋅ E ( s) ] = limt→∞ s→0 s→0 1 + G( s)Idealmente este error deberá ser cero, pero no siempre tiene porqué ser así. En función,por una parte del regulador utilizado y de la planta que se tenga que controlar, lo que constituyela G(s) en la expresión anterior, y por otra parte, el tipo de entrada que se considere, la R(s), setenderá mejor o peor a esta situación. Si se piensa en un sistema de regulación de la velocidadde un motor eléctrico y se obvia en principio la existencia de un regulador, la señal de error E(s)gobernará directamente el motor. Si esta señal fuera cero, el motor no se movería con lo que notendría la velocidad deseada a la salida. Luego en un sistema como ese el error no puede ser nulo.Por el contrario, para el control de la posición de ese mismo motor, si es posible físicamente unerror nulo porque en ese caso el motor estará parado justamente en la posición de referencia.En general, puede considerarse que a un sistema le es más fácil corregir el error ante unaentrada escalón que ante una rampa, puesto que en régimen permanente la primera es constantemientras que la segunda varía constantemente. En función de este tipo de consideraciones seestablece una división de los sistemas de control según los errores que presenten ante lasdiferentes entradas de prueba.6.4.1.1.- Sistemas tipo 0Se dice que un sistema es de tipo 0 cuando tiene un error en régimen permanente finitoy distinto de cero ante una entrada escalón. Si esto es así, es decir, que la salida del sistema escapaz de seguir a la entrada en escalón a una determinada distancia constante, ocurre que parauna entrada en rampa el sistema responde con otra rampa de menor pendiente, de forma quecuando el tiempo tiende a infinito el error en régimen permanente tiende asimismo a infinito(error creciente con el tiempo). En la figura 6.24a se representa el error en régimen permanentede un sistema tipo cero ante la señal escalón y en la 6.24b, ante la señal rampa.Fig. 6.24.- Errores en régimen permanente de un sistema de tipo 0.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.19
Físicamente se puede identificar un sistema de tipo 0 como aquel para el que su cadenadirecta responde con salida constante ante entrada constante, es decir, que no efectúa ningún tipode integración de la señal de entrada. Matemáticamente esto se traduce en que no existe ningúnfactor s en el denominador de la función de transferencia G(s). Así, al hallar el error en régimenpermanente mediante la expresión del teorema del valor del final, resulta lo siguiente:Error ante escalon:Donde KError ante rampa:Donde Kvperpp= lim G( s)≡s→0s→0erpv[ s G s ]= lim ⋅ ( ) ≡s⋅R( s)= lims→1 + G( s)0 01s ⋅s11= lim = =s→1 + G( s) 1 + lim G( s)1 + Ks→0Constante de error de posicion o ganancia estatica de Gs⋅R( s)= lims→1 + G( s)0 01s ⋅2s1 1 1= lim == = =∞s→1 + G( s) lim s s G( s)K 0s→0Constante de error de velocidad[ + ⋅ ]En las anteriores expresiones se han citado a proposito las llamadas constantes de errorde un sistema de control (K p y K v ) que permiten calcular de forma rápida y cómoda el error enrégimen permanente ante escalón o rampa:vperpp1= ; e rpv =1 + Kp1KvLa utilización de los subíndices p (posición) y v (velocidad) proviene de la tradiciónmecánica de los sistemas de control, según la cual se consideraban siempre escalones de posición(señales de posición mecánica constante) y rampas de posición (señales de velocidad mecánicaconstante).Un ejemplo de sistema mecánico tipo 0 sería el control de la velocidad de un motoreléctrico de corriente continua. Cuando al motor se le introduce una señal constante a la entrada(escalón), gira a velocidad constante (señal de salida). Al realimentar el sistema, éste podríaseguir con un cierto error, perfiles de velocidad de giro constante, pero no podría hacer lo propiocon perfiles de aceleración constante (rampas de velocidad). La FDT de un motor de este tipopuede ser expresada de la siguiente forma:6.4.1.2.- Sistemas tipo unoK MG( s)= 1 + s ⋅ TMSe dice que un sistema es de tipo 1 cuando tiene un error en régimen permanente finitoy distinto de cero ante entrada rampa. Si esto es así, es decir, que la salida del sistema es capazde seguir a la entrada en rampa a una determinada distancia constante, ocurre que para unaentrada en escalón el sistema responde con una salida constante en régimen permanente de igualvalor al de la entrada (e rpp =0). En la figura 6.25a se representa el error en régimen permanente deINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.20
un sistema tipo 1 ante escalón y en la 6.25b, ante rampa.Fig. 6.25.- Errores en régimen permanente de un sistema tipo 1.Físicamente se puede identificar un sistema de tipo 1 como aquél para el que su cadenadirecta responde con variación de salida constante ante entrada constante, es decir, que efectúala integración de la señal de entrada. Matemáticamente esto se traduce en que existe un factor sen el denominador de la función de transferencia G(s). Así, al hallar el error en régimenpermanente mediante la expresión ya conocida resulta:Error ante escalon:Error ante rampa:eerpvrpp1 1= = = 01 + K p 1 +∞1=KUn ejemplo de sistema mecánico tipo 1 podría volver a ser el control de un motoreléctrico de corriente continua al que, en este caso se le controla la posición del eje. Cuando almotor se le introduce una señal constante a la entrada, gira a velocidad constante y la posicióndel eje de giro se incrementa linealmente con el tiempo. Si se representara en un gráfico laposición del eje con respecto al tiempo resultaría una rampa de pendiente constante (integral delescalón de entrada). Al realimentar el sistema, éste podría alcanzar las posiciones de consigna contotal precisión (error nulo ante escalón de posición) y seguir, con un cierto error en la posición,perfiles de velocidad de giro constante (rampas de posición). La FDT de un motor para estaaplicación puede ser expresada de la siguiente forma, en la que se identifica claramente el factors en el denominador que caracteriza a los sistemas de tipo 1:K MG( s)=s6.4.1.3.- Sistemas tipo 2v( 1 + s⋅T)Intuyendo la progresión iniciada en los sistemas de tipo 0, se dirá que un sistema es detipo 2 cuando tenga un error en régimen permanente finito y distinto de cero ante una posibleentrada de tipo parabólico. Si esto es así, ocurre que tanto para entradas en escalón como paraentradas en rampa, el sistema responderá con error en régimen permanente nulo.Físicamente se puede identificar un sistema de tipo 2 como aquél para el que su cadenaMINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.21
directa responde con variación de velocidad de salida constante ante entrada constante, es decir,que efectúa una doble integración de la señal de entrada. Matemáticamente esto se traduce en queexiste un factor s 2 en el denominador de la función de transferencia G(s). Así, al hallar el erroren régimen permanente mediante la expresión ya conocida resulta:1 1Error ante escalon: e rpp = = = 01 + K p 1 +∞1 1Error ante rampa: e rpv = = = 0K ∞Un ejemplo de sistema tipo 2 tendría como FDT de cadena directa la siguiente, en la quese identifica claramente el factor s 2 en el denominador que caracteriza a los sistemas de tipo 2:KG( s)=s2 1 + ⋅v( s T)A modo de resumen y extracto de conclusiones, se presentan en el siguiente cuadro lasconstantes de error y errores en régimen permanente de los diferentes tipos de sistemas y entradasa los mismos.Tipo de sistema Entrada Kp K v e rp0 Escalón K p - 1/(1+K p )Rampa - 0 1 Escalón - 0Rampa - K v 1/K v2 Escalón - 0Rampa - 06.4.2.- ANÁLISIS TEMPORAL EN RÉGIMEN TRANSITORIOHasta este punto, se ha visto que cuando un sistema de control responde a determinadasvariaciones de la señal de entrada, tarda un cierto tiempo en estabilizar su salida a una distanciade la entrada, que se ha denominado error en régimen permanente (e rp ). Cuando el error es finito,la distancia entre las señales de entrada y salida es constante (figura 6.24a), mientras que cuandoel error es infinito, esa distancia aumenta con el tiempo (figura 6.24b).Se considera que la respuesta temporal de los sistemas c(t), tiene dos partes: la parte derégimen transitorio o dinámico, c rt (t) y la parte de régimen permanente o estático, c rp (t). Elconjunto de ambas formarán la respuesta total del sistema; c(t)=c rt (t)+c rp (t). Con esto, resultaobvio decir que toda la parte de la respuesta que no pertenece al régimen permanente constituyeel régimen transitorio. El límite puede establecerse de forma rigurosa considerando que elrégimen permanente sólo se alcanza cuando el tiempo tiende a infinito (matemáticamente) o, deINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.22
forma más operativa, cuando la respuesta entra definitivamente dentro de una banda del ±5% delvalor final, una vez transcurrido el llamado tiempo de establecimiento (prácticamente).Como ya se ha mencionado, el cálculo de la función de salida, c(t), suele hacerse a travésde la transformada inversa de Laplace de la función C(s), donde C(s)=R(s)#M(s) y R(s) es latransformada de la señal de entrada r(t). La obtención de la transformada inversa de Laplace pasapor la descomposición en fracciones simples de la expresión de C(s) para expresarla como sumade transformadas inversas sencillas. Esta descomposición y, por consiguiente, la forma de c(t)dependerá fuertemente del denominador de C(s), más concretamente, de los valores de s que loanulan, pues de ellos se obtienen los denominadores de las fracciones simples. Si sólo se tienenen cuenta entradas de prueba (escalón y rampa) cuyas transformadas R(s) son perfectamenteconocidas, el problema se limita a resolver la ecuación siguiente, conocida como ecuacióncaracterística del sistema:1+ F ( s) ⋅G( s) ⋅ H ( s)= 0que representa al denominador de la FDT del sistema (M(s)), según se vio en el punto 6.3.1.1.Del valor de las raíces de esa ecuación dependerá que el sistema sea estable o no, quepresente oscilaciones durante el transitorio, que tenga un tiempo de establecimiento mayor omenor, etc. Para los sistemas de control lineales más comunes, se tienen FDT de la formacociente de polinomios en s, que ante entradas de prueba como las vistas responden con unaexpresión general como la siguiente:N∑( ω φ )ic( t) = A e ⋅ cos t +i = 1i−αtiidonde:-. i es la parte real de la solución i de la ecuación.& i es la parte imaginaria de la solución i de la ecuación.A i y 3 i son constantes.En la anterior expresión general conviene tener en cuenta que cualquiera de losparámetros indicados puede tener valor nulo, con lo que pueden aparecer sumandos completoso escalones (constantes), exponenciales sobreamortiguadas (sin el término cosenoidal),oscilaciones mantenidas, etc. En general, cuanto mayor es parte imaginaria de las raíces (& i ) dela ecuación característica, más rápida es la oscilación que aparece y cuanto más negativa en suparte real (-. i ), menos tarda en desaparecer su influencia en la expresión (si fuera positiva, elsistema sería inestable). Por este último motivo, los sistemas con polinomio característico deorden superior al segundo (con -. i muy negativo a partir de -. 3 ) suelen aproximarse a los de ordendos, despreciando las raíces con parte real más negativa. Así, se aprovecha todo el conocimientodisponible acerca de los sistemas de primer y segundo orden.Los parámetros utilizados para caracterizar la respuesta temporal transitoria de un sistemade control son los mostrados en la figura 6.26.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.23
Fig. 6.26.- Respuesta transitoria de un sistema de control. Parámetros característicos.El significado de estos parámetros es:t r : tiempo de subidat p : tiempo de picoM p : máximo sobreimpulsot s : tiempo de establecimientoEn la mayoría de los casos, interesa que los parámetros anteriores sean lo menoresposibles, lo que tratará de conseguirse diseñando adecuadamente los reguladores de control. Parasistemas de orden uno o para sistemas de orden superior sobreamortiguados (raíces reales), sólotiene sentido el parámetro correspondiente al tiempo de establecimiento, que puede hallarseaproximadamente con el cociente:t s≈ 3 αDe la misma forma, existen expresiones que permiten hallar el resto de parámetros a partirdel conocimiento de las raíces de la ecuación característica del sistema, si bien son cada vez másutilizados los programas de simulación para estas tareas.6.5.- ANÁLISIS TEMPORAL DE SISTEMAS DISCRETOS DE CONTROLPara abordar este tema una vez visto el análisis temporal de los sistemas continuos, bastatener en cuenta que los sistemas discretos cambian de valor en instantes discretos de tiempo y quedichos sistemas se caracterizan por funciones de transferencia en z y no en s. Sin embargo, lascosas no cambian radicalmente con respecto al apartado anterior: en primer lugar, la forma de lassecuencias manejadas por estos sistemas pueden aproximarse a señales continuas si el periodode muestreo es lo suficientemente pequeño (véase la evolución en la figura 6.27) y en segundolugar, precisamente el hecho de trabajar en el dominio transformado permite seguir métodoscompletamente análogos a los de sistemas continuos, facilitándose en gran medida el análisis delos sistemas discretos.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.24
Fig. 6.27.- Influencia del periodo de muestreo sobre las señales.La forma en que un sistema de control produce la señal de control o accionadora (A(z)en la figura 6.15) depende del regulador o controlador (F(z) en la misma figura) que se sitúe enla cadena directa de control, y la respuesta del sistema depende fuertemente, a su vez, de dichaseñal. Por tanto, para conseguir un adecuado comportamiento del sistema o para mejorar el yaestablecido se debe diseñar y elegir adecuadamente el regulador F.Como ya se ha adelantado en párrafos anteriores, de entre las diversas técnicas utilizablespara el análisis y diseño de sistemas de control, una de las más inmediatas resulta la que se basaen el estudio del comportamiento de los mismos a lo largo del tiempo. Tomando como base departida el modelo matemático de los sistemas basados en las FDT y transformadas, el procesopartiría del conocimiento de la FDT del sistema en cuestión y de la transformada correspondiente(Z para sistemas discretos) de la o las señales de entrada que interese considerar. A continuaciónse halla la salida del sistema (todavía en el dominio transformado Z) para, a través de latransformada inversa Z, calcular la expresión de respuesta en el tiempo que permita extraer lasconclusiones deseables (figura 6.28).Fig. 6.28.- Proceso de obtención de la respuesta temporal de un sistema discreto.Sin embargo, el procedimiento anterior no es necesario aplicarlo en su totalidad en lamayoría de los casos, debido a que desde el dominio transformado se pueden extraer conclusionesacerca de la respuesta temporal de los sistemas. Esto se debe principalmente a dos motivos: eldominio que se tiene ya de esta materia y la utilización de paquetes informáticos para análisis ydiseño de sistema de control.En línea con lo mencionado anteriormente acerca de la experiencia existente en estosaspectos de la teoría de control y al igual que para los sistemas continuos, es común la utilizaciónde señales de prueba determinadas para la caracterización de la respuesta temporal de lossistemas. Las más utilizadas son el escalón y la rampa, que se pueden obtener a partir delmuestreo de las correspondientes señales continuas. Este tipo de señales aparecen con frecuenciaen el funcionamiento normal de diversos tipos de servomecanismos o sistemas de regulación dedeterminadas variables físicas. Las transformadas Z de estas señales son las siguientes:INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.25
Escalon:Rampa:zrk= 1, ∀ k > 0 ⇒ R( z)=z − 1zr = kT, ∀ k > 0 ⇒ R( z) = T ;k( z − )1 2T≡Periodo de muestreoObsérvese que la rampa aparece multiplicada por T para independizar su pendiente delperiodo de muestreo utilizado en el sistema.De la misma forma que para sistemas continuos, se considera régimen transitorio yrégimen permanente en la respuesta de los sistemas discretos.6.5.1.- ANÁLISIS TEMPORAL EN RÉGIMEN PERMANENTEEl estudio y sus resultados son absolutamente análogos a los correspondientes a sistemascontinuos. En un sistema tipo como el de la figura 6.29, en el que la realimentación es unitariay donde G(z) es la FDT de la cadena directa, la señal E(z) es la diferencia entre la entrada y lasalida del sistema, es decir el error. Aplicando las relaciones existentes entre las diversasvariables implicadas es fácil obtener su expresión matemática en el dominio transformado Z.Fig. 6.29.- Modelo de sistema discreto tipo para el cálculo de errores.E ( z)= + 1R( z)G( z)A partir de la expresión anterior y aplicando el teorema del valor final de la transformadaZ, se puede hallar el error en régimen permanente:z − ⋅R zerp= lim ek= lim [( z −1) ⋅ E ( z) ] = lim ( 1 ) ( )k →∞ z→1 z→11 + G( z)6.5.1.1.- Sistemas tipo 0Se dice que un sistema es de tipo 0 cuando tiene un error en régimen permanente finitoy distinto de cero ante entrada escalón. Si esto es así, es decir, que la salida del sistema es capazde seguir a la entrada en escalón a una determinada distancia constante, ocurre que para unaentrada en rampa el sistema responde con otra rampa de menor pendiente, de forma que cuandoel tiempo tiende a infinito el error en régimen permanente tiende asimismo a infinito (errorcreciente con el tiempo).Físicamente se puede identificar un sistema de tipo 0 como aquél para el que su cadenadirecta responde con salida constante ante entrada constante, es decir, que no efectúa ningún tipoINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.26
de integración de la señal de entrada. Matemáticamente esto se traduce en que no existe ningúnfactor (z-1) en el denominador de la FDT G(z). Conviene mencionar aquí que el tipo de la plantacontinua G(s) se mantiene al pasar a su equivalente discreto BG(z). Al hallar el error en régimenpermanente mediante la expresión antes determinada resulta lo siguiente:zz − ⋅z − ⋅R zz −Error ante escalon: e rpp = lim ( ) ( ) ( 1)1( 1)11= lim= =z→1 1 + G( z)z→11 + G( z) 1 + lim G( z)1 + KDonde Kp= lim G( z)≡z →1z →1Constante de error de posicion o ganancia estatica de GpError ante rampa:=z →1DondeT[ z −1 ⋅G z ] K v 0K lim [( z 1) G( z)]lim ( ) ( )vz →1erpvz − ⋅ R z= lim ( 1 ) ( ) = limz→1 + G( z)1 z→1T T= = = ∞= − ⋅ ≡eT z( z −1)⋅2( z − 1)T=1 + G( z) lim ( 1) ( 1) ( )Constante de error de velocidadrpp1= ; e rpv =1 + KpTKvz →1[ z − + z − ⋅G z ]En las anteriores expresiones se muestra que la forma de calcular el error en régimenpermanente en sistemas discretos es igual a la empleada para sistemas continuos, con la salvedadde que en la expresión del error ante rampa aparece el factor T, por el motivo ya comentadoanteriormente. Igualmente, la forma de hallar las constantes de error también varía ligeramente,pasando el punto de interés de s=0 a z=1.6.5.1.2.- Sistemas tipo 1Se dice que un sistema es de tipo 1 cuando tiene un error en régimen permanente finitoy distinto de cero ante entrada rampa. Si esto es así, es decir, que la salida del sistema es capazde seguir a la entrada en rampa a una determinada distancia constante, ocurre que para unaentrada en escalón el sistema responde con una salida constante en régimen permanente de igualvalor al de la entrada (e rpp =0).Físicamente se puede identificar un sistema de tipo 1 como aquél para el que su cadenadirecta responde con variación de salida constante ante entrada constante, es decir, que efectúala integración de la señal de entrada. Matemáticamente esto se traduce en que existe un factor(z-1) en el denominador de la FDT G(z). Así, al hallar el error en régimen permanente mediantela expresión ya conocida resulta lo siguiente:=INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.27
Error ante escalon:Error ante rampa:eerpprpv1 1= = = 01 + K 1 +∞T=Kvp6.5.1.3.- Sistemas tipo 2Intuyendo la progresión iniciada en los sistemas de tipo 0, se dirá que un sistema es detipo 2 cuando tenga un error en régimen permanente finito y distinto de cero ante una posibleentrada de tipo parabólico. Si esto es así, ocurre que tanto para entradas en escalón como paraentradas en rampa, el sistema responderá con error en régimen permanente nulo.Físicamente se puede identificar un sistema de tipo 2 como aquél para el que su cadenadirecta responde con variación de velocidad salida constante ante entrada constante, es decir, queefectúa una doble integración de la señal de entrada. Matemáticamente esto se traduce en queexiste un factor (z-1) 2 en el denominador de la FDT G(z). Así, al hallar el error en régimenpermanente mediante la expresión ya conocida resulta:Error ante escalon:Error ante rampa:eerpprpv1 1= = = 01 + Kp 1 +∞T T= = = 0K ∞vA modo de resumen y extracto de conclusiones, se presentan en el siguiente cuadro lasconstantes de error y errores en régimen permanente de los diferentes tipos de sistemas y entradasa los mismos (compárese con la obtenida para sistemas continuos).Tipo de sistema Entrada Kp K v e rp0 Escalón K p - 1/(1+K p )Rampa - 0 1 Escalón - 0Rampa - K v T/K v2 Escalón - 0Rampa - 06.5.2.- ANÁLISIS TEMPORAL EN RÉGIMEN TRANSITORIOTeniendo en cuenta que todas las definiciones que caracterizan las componentespermanente y transitoria de los sistemas continuos se mantienen para los sistemas discretos, sóloes necesario tener en cuenta que en este caso el cálculo de la secuencia de salida c k se hace através de la transformada inversa Z de la función C(z), donde C(z)=R(z)#M(z) y R(z) es laINTRODUCCIÓN A LA TEORÍA DE CONTROL 6.28
transformada Z de la secuencia de entrada r k . La obtención de la transformada inversa Z, al igualque la de Laplace, pasa por la descomposición en fracciones simples de la expresión C(z) pararepresentarla como suma de transformadas inversas sencillas. Esta descomposición y, porconsiguiente, la forma de c k dependerá fuertemente del denominador de C(z), más concretamente,de los valores de z que lo anulan, ya que de éste se obtienen los denominadores de las fraccionessimples. Si sólo se tienen en cuenta entradas de prueba cuyas transformadas R(z) sonperfectamente conocidas, el problema se limita a resolver la ecuación siguiente, conocida comoecuación característica del sistema:1+ F ( z) ⋅ BGH ( z)= 0que representa al denominador de la FDT del sistema (M(z)), según se vio en el apartado 6.3.1.2.Del valor de las raíces de esa ecuación dependerá que el sistema sea estable o no, quepresente oscilaciones durante el transitorio, que tenga un tiempo de establecimiento mayor omenor, etc. Para los sistemas de control lineales más comunes se tienen FDT de la forma cocientede polinomios en z, que ante entradas de prueba como las vistas responden con una expresióngeneral como la siguiente:donde:Nkk ∑ i ii = 1c = A ⋅ z ⋅cosϕz i es el módulo de la solución i de la ecuaciónQ ik es el ángulo que depende de la solución i de la ecuación y del instante kA i es constanteEn la anterior expresión conviene tener en cuenta que cualquiera de los parámetrosindicados puede tener valor nulo, con lo que pueden aparecer sumandos completos o escalones(constantes), exponenciales sobreamortiguadas (sin el término cosenoidal), oscilacionesmantenidas, etc. En general, cuanto mayor es el módulo de las raíces de la ecuación característica,más tarda en desaparecer su influencia en la expresión (si fuera mayor que 1 el sistema seríainestable). Por este último motivo, suelen aproximarse los sistemas con polinomio característicode orden superior al segundo por sistemas de orden 2, despreciando las raíces con módulo máspróximo a cero. Así, se aprovecha todo el conocimiento disponible acerca de los sistemas deprimer y segundo orden.Los parámetros utilizados para caracterizar la respuesta temporal transitoria de un sistemade control discreto son los mismos que para los sistemas continuos, teniendo en cuenta que enlugar de hablar de tiempos se habla de intervalos, medidos en instantes de muestreo. Para pasaral dominio del tiempo habrá que multiplicar los intervalos por el periodo de muestreo. A modode ejemplo, el intervalo de establecimiento se calcula en este caso, de forma aproximada así:ikks≈ 3zidonde z i es el módulo del polo dominante del sistema.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.29