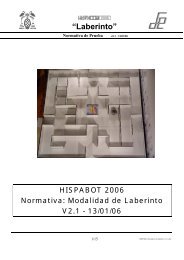
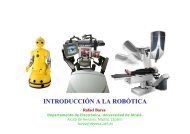
Fig. 6.14.- Bloque bloqueador en un sistema de control.Así, teniendo en cuenta todo lo comentado, el diagrama de bloques de un sistema discretoy realimentado de control de un proceso continuo, puede tener varias modalidades, las cualesaparecen reflejadas en las figuras 6.15, 6.16 y 6.17, cuya diferencia radica, básicamente, en lasfunciones que realiza el procesador discreto del sistema, quedando el resto de los bloquescondicionados por este hecho.En la figura 6.15, el procesador discreto se encarga de generar la señal de referencia delsistema R(z), compararla con la señal de realimentación discretizada B(z) y generar la acción decontrol a través del regulador F(z).Fig. 6.15.- Primer modelo de un sistema discreto y realimentado de control de un proceso continuo.Sin embargo, en la figura 6.16, la señal de referencia R(s) es generada de forma continuadesde el exterior del procesador, por lo que es necesario muestrearla con el mismo periodo T conel que se genera la secuencia de entrada al procesador desde la línea de realimentación B(z). Elprocesador es este caso ya sólo efectúa la comparación y la regulación.Fig. 6.16.- Segundo modelo de un sistema discreto y realimentado de control de un proceso continuo.Finalmente, en la figura 6.17, el procesador únicamente se encarga de realizar laregulación mediante el controlador discreto F(z), siendo continuo el comparador.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.14
Fig. 6.17.- Tercer modelo de un sistema discreto y realimentado de control de un proceso continuo.Se puede observar como, en todos los casos, la posición de los bloques muestreador(ADC) y bloqueador (DAC) es siempre aquella en la que separan adecuadamente la parte discreta(variable z) de la parte continua (variable s) del sistema. En muchos casos, por simplificación,el elemento transductor H(s) puede considerarse como parte de la planta G(s), en cuyo caso secontrola realmente la salida de aquel y no de ésta, de forma que la realimentación resulta unitaria(H(s) = 1).Para el cálculo de la función de transferencia de un sistema discreto, se propone unmétodo que considera el sistema con entrada y salida discretas, por lo que el diagrama de bloquesde la figura 6.15 es el más adecuado. Obsérvese como en dicha figura se ha añadido unmuestreador a la salida del sistema, que tiene únicamente un sentido matemático (no aparecerealmente en el sistema físico). Trabajando de esta forma la función de transferencia global seráuna función de z y sólo permitirá conocer la salida del sistema en los instantes de muestreo(separados T segundos), de ahí la existencia de ese muestreador ficticio. En cualquier caso, si elperiodo de muestreo T es adecuado, dicho conocimiento será suficiente para caracterizar elsistema.Como paso previo al cálculo de la función de transferencia global del sistema, en z, se hade hallar un equivalente discreto de los bloques continuos, es decir, de un bloque que procesaseñales continuas se ha de obtener un equivalente que procese secuencias discretas. Ello puedelograrse considerando las estructuras de las figura 6.18 y 6.19 dentro del sistema de la figura 6.15.Efectivamente, considerando un bloqueador a la entrada de la parte continua y unmuestreador a la salida, se obtendrá un sistema discreto equivalente al continuo correspondiente.De esta forma y a partir de una algoritmo matemático contemplado en cualquier programa CADpara sistemas de control, se puede hallar una función de transferencia en z para las estructurasanteriores. Esta operación suele venir descrita en dichos programas bajo los nombres de:discretización, equivalente z, s z, etc.En la figura 6.18 se muestra la caracterización de la planta (continua, G(s)) con sufunción de transferencia en z, obteniéndose un “nuevo” nombre para ella, BG(z), que nos dicesu procedencia u origen en el dominio continuo.INTRODUCCIÓN A LA TEORÍA DE CONTROL 6.15