Eure-k - Universidad Panamericana
Eure-k - Universidad Panamericana
Eure-k - Universidad Panamericana

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
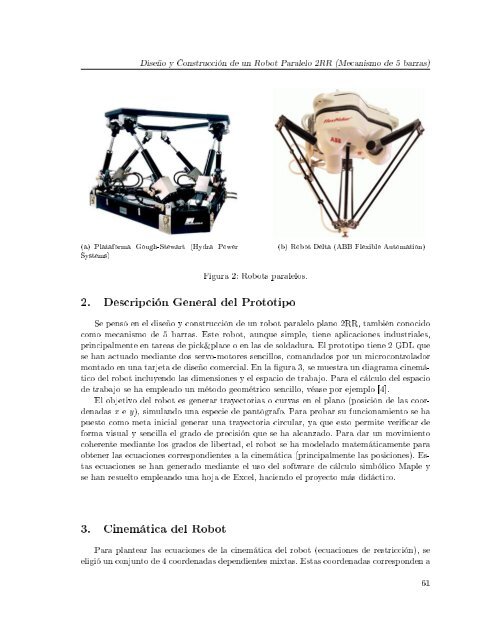
Diseño y Construcción de un Robot Paralelo 2RR (Mecanismo de 5 barras)(a) Plataforma Gough-Stewart (Hydra PowerSystems)(b) Robot Delta (ABB Flexible Automation)Figura 2: Robots paralelos.2. Descripción General del PrototipoSe pensó en el diseño y construcción de un robot paralelo plano 2RR, también conocidocomo mecanismo de 5 barras. Este robot, aunque simple, tiene aplicaciones industriales,principalmente en tareas de pick&place o en las de soldadura. El prototipo tiene 2 GDL quese han actuado mediante dos servo-motores sencillos, comandados por un microcontroladormontado en una tarjeta de diseño comercial. En la gura 3, se muestra un diagrama cinemáticodel robot incluyendo las dimensiones y el espacio de trabajo. Para el cálculo del espaciode trabajo se ha empleado un método geométrico sencillo, véase por ejemplo [4].El objetivo del robot es generar trayectorias o curvas en el plano (posición de las coordenadasx e y), simulando una especie de pantógrafo. Para probar su funcionamiento se hapuesto como meta inicial generar una trayectoria circular, ya que esto permite vericar deforma visual y sencilla el grado de precisión que se ha alcanzado. Para dar un movimientocoherente mediante los grados de libertad, el robot se ha modelado matemáticamente paraobtener las ecuaciones correspondientes a la cinemática (principalmente las posiciones). Estasecuaciones se han generado mediante el uso del software de cálculo simbólico Maple yse han resuelto empleando una hoja de Excel, haciendo el proyecto más didáctico.3. Cinemática del RobotPara plantear las ecuaciones de la cinemática del robot (ecuaciones de restricción), seeligió un conjunto de 4 coordenadas dependientes mixtas. Estas coordenadas corresponden a61