

Serie Storiche e Processi Stocastici
Serie Storiche e Processi Stocastici
Serie Storiche e Processi Stocastici

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Introduzione<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Desiderando introdurre intuitivamente il concetto di serie storica basta fare riferimento a<br />
qualsiasi fenomeno misurabile che varia nel tempo e la cui registrazione costituisce, appunto, la<br />
serie storica. Tale successione di dati rappresenta una informazione statistica sulla quale potremmo<br />
avere interesse, oltre che nel descrivere, anche nell‟inferire (ovvero all‟applicare gli strumenti<br />
propri dell‟analisi statistica con scopi di previsione).<br />
Più precisamente, per serie storica o serie temporale intendiamo una successione di<br />
osservazioni ordinate logicamente secondo una variabile t, la quale nella maggior parte dei casi<br />
rappresenta il tempo. Risulta quindi di interesse lo studio della dinamica temporale di tale serie<br />
(analisi univariata) e delle eventuali connessioni con altre serie storiche ad essa collegate (analisi<br />
multivariata). Confluiscono in questa analisi gli strumenti e i contributi della statistica, del calcolo<br />
della probabilità, dell‟econometria e dell‟analisi matematica.<br />
Per questa trattazione le nozioni richieste in questi campi sono quelle di base di normali corsi<br />
universitari di analisi matematica, statistica descrittiva e inferenziale e qualche conoscenza di<br />
calcolo delle probabilità, principalmente con riguardo alle variabili casuali.<br />
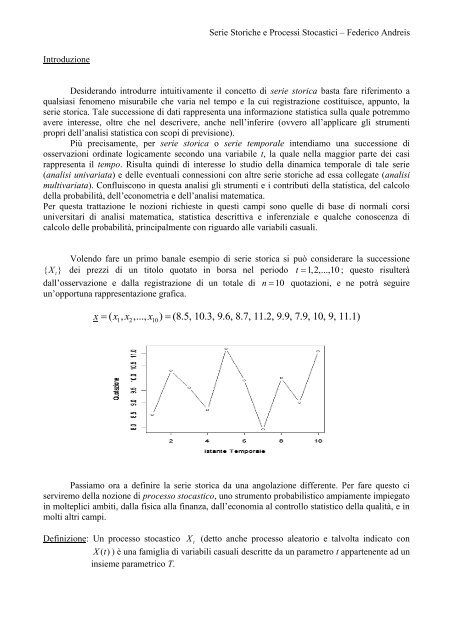
Volendo fare un primo banale esempio di serie storica si può considerare la successione<br />
{ X t}<br />
dei prezzi di un titolo quotato in borsa nel periodo t 1,2,...,10 ; questo risulterà<br />
dall‟osservazione e dalla registrazione di un totale di n 10 quotazioni, e ne potrà seguire<br />
un‟opportuna rappresentazione grafica.<br />
x ( x , x ,..., x ) (8.5, 10.3, 9.6, 8.7, 11.2, 9.9, 7.9, 10, 9, 11.1)<br />
1 2 10<br />
Passiamo ora a definire la serie storica da una angolazione differente. Per fare questo ci<br />
serviremo della nozione di processo stocastico, uno strumento probabilistico ampiamente impiegato<br />
in molteplici ambiti, dalla fisica alla finanza, dall‟economia al controllo statistico della qualità, e in<br />
molti altri campi.<br />
Definizione: Un processo stocastico X t (detto anche processo aleatorio e talvolta indicato con<br />
Xt () ) è una famiglia di variabili casuali descritte da un parametro t appartenente ad un<br />
insieme parametrico T.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Cosa significa tutto questo? Significa che un processo stocastico è una successione di<br />
variabili aleatorie ordinate secondo un parametro t T , solitamente identificato con il tempo. La<br />
conoscenza di un processo stocastico equivale alla conoscenza della distribuzione di probabilità<br />
multipla (multivariata) per qualsiasi sottoinsieme di T e per qualsiasi valore delle variabili casuali.<br />
Occorre caratterizzare però ulteriormente questa nozione di processo stocastico; per fare<br />
questo introduciamo delle distinzioni. Parleremo di processo stocastico continuo qualora le variabili<br />
casuali che lo compongono siano di natura continua, di processo stocastico discreto in caso<br />
contrario; distingueremo inoltre fra processi stocastici a tempo continuo e a tempo discreto, nei casi,<br />
rispettivamente, che il parametro t T abbia supporto continuo o discreto.<br />
Esempio: sia X t un processo stocastico che descrive le rilevazioni negli istanti temporali<br />
tT {1,2,3,...} di una qualche grandezza fisica e le cui realizzazioni siano<br />
caratterizzate da leggi di distribuzione gaussiane. Allora il processo in esame sarà da<br />
definirsi come processo stocastico continuo a tempo discreto.<br />
Un tale processo è quindi la famiglia di variabili casuali { X1, X 2,...}<br />
, per la cui conoscenza<br />
occorre specificare le funzioni di densità congiunte di ciascuna combinazione di esse. Formalmente<br />
un processo t X è noto se è nota la funzione di densità ( Xt , X ,..., )<br />
1 t X 2 t per ogni k e per ogni k-pla<br />
k<br />
di valori ( t1, t2,..., t k ) di variabili casuali (d‟ora in poi v.c.). Da questo si può già intuire l‟estrema<br />
complicazione dello studio di un processo stocastico nella sua generalità, e in particolare la pratica<br />
impossibilità di inferire direttamente su di esso.<br />
Volendo descrivere meglio la struttura probabilistica di X t possiamo osservare che, per<br />
esempio, fissando t 3,<br />
si ottiene la v.c. X 3 , che possiede una sua propria funzione di densità di<br />
probabilità (nel caso continuo, di massa di probabilità nel caso discreto) che sarà correlata oppure<br />
no alle altre, e così via. Su X 3 possiamo effettuare un esperimento e rilevare dei valori appartenenti<br />
al suo campo di variazione.<br />
Estendendo a tutto il processo, se fissiamo una prova da effettuare su X t (ovvero<br />
osserviamo la successione dei risultati campionari x1, x 2,...<br />
) otterremo una successione di valori,<br />
funzione della variabile t, chiamata realizzazione o traiettoria del processo. Risulta evidente che,<br />
dato un processo X t , esistono infinite possibili realizzazioni che sono precisamente tutte quelle<br />
osservabili ripetendo indefinitamente l‟esperimento. Segue un esempio grafico di due realizzazioni<br />
campionarie dal medesimo processo.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Infine, se in X t fissiamo t e contemporaneamente fissiamo la prova sperimentale (per<br />
esempio fissiamo t 3 ed osserviamo il valore risultante per X 3 ) otteniamo, ovviamente, un<br />
numero reale: cioè il valore realizzato per la v.c. fissata, ovvero il valore della realizzazione al<br />
tempo t fissato.<br />
Possiamo quindi introdurre a questo punto l‟intendimento di serie storica { x , t 1,2,..., N}<br />
come una parte finita di una realizzazione di un processo stocastico X t .<br />
Tale definizione concorda con quella fornita nell‟introduzione di serie storica come<br />
“successione di osservazioni ordinate logicamente secondo una variabile t” e qualifica inoltre in<br />
senso probabilistico la natura dei problemi che ci proponiamo di affrontare. Per esempio la<br />
previsione di un valore del fenomeno in esame al tempo t N 1 note che siano le osservazioni<br />
fino a t N diventa uno specifico problema di Calcolo delle Probabilità. Cioè: qual è la probabilità<br />
X assuma un determinato valore (e qui entra, ad esempio, la teoria dei test statistici)<br />
che la v.c. N 1<br />
se su tale variabile si hanno informazioni derivate dall‟insieme di v.c. ( X1, X 2,...,<br />
X N ) che hanno<br />
generato la realizzazione finita ( x1, x2,..., x N ) .<br />
Si noti d‟altro canto che una simile definizione mette in luce anche la limitazione delle<br />
informazioni sul processo le quali sono, in generale, desumibili dalla conoscenza della serie storica.<br />
Difatti essa non è altro che una parte finita di una singola realizzazione del processo; ci troviamo<br />
quindi a lavorare non solo con un campione unico della famiglia delle v.c. che caratterizzano il<br />
processo, ma si tratta anche di un campione troncato, poiché si osserva solo per t 1,2,..., N.<br />
Tutto<br />
questo impone quindi una limitazione della classe dei processi stocastici, perché solo per una parte<br />
più ristretta di essi sarà possibile dedurre informazioni “consistenti” dalle realizzazioni finite di cui<br />
disponiamo nelle applicazioni reali.<br />
Passiamo ora ad analizzare in modo più formale i processi stocastici e le loro<br />
caratterizzazioni fondamentali.<br />
t
<strong>Processi</strong> <strong>Stocastici</strong><br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Rifacendoci alla definizione presentata nell‟introduzione di processo stocastico, andiamo a<br />
fornirne ora una sorta di classificazione, sulla base delle v.c. componenti un processo e dei loro<br />
legami.<br />
Una prima distinzione può essere fatta con riguardo all‟indipendenza o meno delle v.c.<br />
componenti il processo. Tale stato difficilmente si riscontra nella realtà, l‟unico processo a<br />
componenti incorrelate che tratteremo sarà il processo definito White Noise (rumore bianco) di<br />
valor medio nullo e varianza costante (cioè non dipendente da t). In seguito verrà indicato con<br />
A t e siglato con<br />
2<br />
t (0, A)<br />
2<br />
A<br />
A WN . Un processo stocastico WN è quindi caratterizzato come segue:<br />
EA ( ) 0<br />
t<br />
E( A ) Var( A ) <br />
2 2<br />
t t A<br />
0<br />
t s<br />
Cov( At , As ) E( At , As<br />
) 2<br />
<br />
A t s<br />
Non vengono fatte a priori ipotesi sulla distribuzione di A1, A 2,...<br />
, ma qualora si supponga<br />
che, per ogni t, A t sia anche una v.c. Normale, allora si parla di Processo White Noise Gaussiano.<br />
Poiché l‟incorrelazione di v.c. Normali implica l‟indipendenza, un processo WN Gaussiano è a<br />
componenti indipendenti.<br />
Una seconda distinzione riguarda la legge di probabilità delle v.c. componenti. Possiamo<br />
infatti ipotizzare una prefissata funzione di densità (nel caso continuo) per tali variabili e definire di<br />
conseguenza il processo risultante (un risultato teorico noto come Teorema di Kolmogorov ci<br />
garantisce che, per ogni n intero, note che siano le densità di probabilità n-variate<br />
f ( x , x ,..., x ; t , t ,..., t ) , il processo stocastico è completamente caratterizzato). L‟ipotesi più<br />
1 2 n 1 2 n<br />
comune è quella di suppore che le v.c. ( Xt , X ,..., )<br />
1 t X 2 t costituiscano una variabile aleatoria<br />
k<br />
Multinormale per ogni ( t1, t2,..., t k ) e per ogni k 1.<br />
In tal caso il processo stocastico X t si<br />
definisce processo Gaussiano e possiede funzione di densità multivariata<br />
<br />
f ( x , x ,..., x ) (2 ) exp ( x ) ( x ) <br />
1 2<br />
k<br />
2<br />
<br />
N 1 1<br />
2<br />
<br />
2 1<br />
x t t t t t<br />
dove ( EX ( )) è il vettore dei valori medi e [ Cov( X , X )] la matrice delle varianze e<br />
t ti<br />
ti tj<br />
covarianze del processo.<br />
E‟ interessante soffermarsi sul fatto che un processo Gaussiano è caratterizzato solo da t e<br />
e quindi, per esempio, un processo Gaussiano di valore medio 0 per ogni t è caratterizzato<br />
esclusivamente dalla matrice delle varianze e covarianze delle v.c. X , X componenti il<br />
ti tj<br />
processo. Questa osservazione è di particolare rilievo perché ci dice che in una classe particolare e<br />
limitata di processi stocastici (quella Gaussiana ad esempio) la conoscenza del processo stocastico<br />
(e quindi di tutte le funzioni del processo) può essere ricondotta alla conoscenza di una particolare<br />
categoria di funzioni (quali possono essere i momenti misti ad esempio), a loro volta stimabili dalle<br />
realizzazioni finite (e quindi dalle serie storiche).<br />
Altre distinzioni possono essere fatte con riguardo al comportamento della successione di<br />
v.c. rispetto al parametro t. Si tratta dunque di andare a vedere se le variabili risultino o meno in un
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
qualche equilibrio dinamico rispetto al tempo, in termini di valore atteso, di varianza, di entrambi o<br />
di altre misure ancora. Se un processo stocastico X t presenta una distribuzione di equilibrio quando<br />
t , ovvero sul piano delle realizzazioni è presente una certa “omogeneità temporale” di natura<br />
stocastica, allora potremo parlare di processo stocastico stazionario.<br />
Più precisamente parleremo di processo stocastico stazionario in senso stretto o forte<br />
qualora la distribuzione multivariata delle v.c. ( Xt , X ,..., )<br />
1 t X 2 t non sia funzione di ( t k<br />
1, t2,..., t k )<br />
per ogni k 1.<br />
Formalmente:<br />
( X , X ,..., X ) ( X , X ,..., X ) ( t , t ,..., t ) e j<br />
t1 t2 tk t1 j t2 j tk j 1 2 k<br />
Ne consegue, per k 1,<br />
che XtXt j , e quindi tutte le “marginali” del processo sono<br />
identicamente distribuite, da cui avranno uguale media e varianza<br />
2<br />
Var( Xt ) , t .<br />
EX ( t ) ,<br />
Analogamente, per k 2 , ( X , X ) ( X , X )<br />
t t t jt j . La distribuzione congiunta dipende<br />
1 2 1 2<br />
solamente da t2 t1<br />
e non dalla traslazione j. E così via crescendo in dimensione.<br />
Ne consegue che se si considerano le componenti ( Xt, Xt h)<br />
, ed esistono i momenti fino al secondo<br />
ordine, la covarianza dipende solo da h:<br />
Cov( X , X ) E[( X E( X ))][( X E( X ))] <br />
t th t t th th E[( X )( X )]<br />
<br />
<br />
h<br />
t th Per h 0 la covarianza coincide con la varianza di t X<br />
2<br />
0 Cov( Xt , Xt ) Var( Xt<br />
) <br />
Le covarianze di un processo stocastico stazionario in senso stretto sono funzioni di h 0, 1, 2,... .<br />
La funzione h appena introdotta viene denominata funzione di autocovarianza del processo<br />
ed è una funzione simmetrica, infatti<br />
<br />
Cov( X , X ) Cov( X , X ) <br />
h t th th t<br />
Cov( X s, X sh ) h<br />
(posto t h s )<br />
Si definisce analogamente anche una funzione di autocorrelazione come segue:<br />
{ : h 0, 1, 2,...}<br />
h<br />
Cov( X , X )/[ Var( X ) Var( X )] <br />
h t thtth ( ) <br />
12<br />
h 0 0 h 0<br />
Ed essendo inoltre 0 1 ed ancora h h.<br />
1<br />
2
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
La verifica dell‟ipotesi di stazionarietà in senso stretto è nella maggior parte dei casi reali<br />
quasi impossibile, ci si limita dunque spesso a controllare che siano verificate delle condizioni<br />
meno forti e riguardanti solo i momenti fino al secondo ordine (media, varianza, covarianza). Un<br />
processo che rispetti tali proprietà è definito processo stocastico stazionario in senso lato o debole.<br />
Generalmente si considera solo quest‟ultimo tipo di stazionarietà nelle applicazioni, riconducendo<br />
la verifica alle proprietà di media, varianza e autocovarianza. In particolare diremo che un processo<br />
è stazionario in senso lato se verifica le seguenti condizioni:<br />
1. EX ( t ) , per ogni t<br />
2. EX (<br />
2<br />
) 2<br />
, per ogni t<br />
t<br />
3. E[( Xt )( X s )] st , per ogni coppia ( ts , )<br />
La prima condizione richiede che il valor medio del processo sia costante e pari a al<br />
2<br />
finita e costante al variare di t;<br />
variare di t; la seconda impone che il processo abbia varianza<br />
l‟ultima condizione infine implica che per ogni t e s esista la funzione di autocovarianza fra le<br />
variabili t X e X s . Tutto questo implica l‟esistenza dei momenti fino al secondo ordine, ma non<br />
viene imposta alcuna condizione necessaria sulle funzioni di densità multivariate che caratterizzano<br />
il processo X t . Da questo discende che mentre la stazionarietà in senso stretto implica, quando<br />
esistano i momenti fino al secondo ordine, quella in senso lato, non vale il contrario.<br />
Per quale motivo nella pratica risultano solitamente sufficienti le condizioni deboli di<br />
stazionarietà del processo? Questo è giustificato dal ruolo fondamentale giocato dalla distribuzione<br />
Normale nello studio di molti fenomeni fisici e naturali, per i quali è valido il Teorema del Limite<br />
Centrale: dal momento che, sotto ipotesi di gaussianità, le condizioni di stazionarietà debole sono<br />
sufficienti per avere anche la stazionarietà in senso forte, questo garantisce di potere evitare la<br />
complicata (quando non impossibile) verifica in molteplici situazioni.<br />
Un‟altra proprietà che, come le precedenti, un processo può possedere o meno, è<br />
l‟invertibilità. Si tratta della possibilità di esprimere un processo X t tramite le v.c. precedenti<br />
secondo l‟ordine logico imposto dal parametro t (e quindi ad esempio precedenti temporalmente);<br />
formalmente significa che esistono una funzione lineare h () ed un processo WN A t tali che, per<br />
ogni t, sia possibile scrivere<br />
X h( X , X ,...) A<br />
t t1 t2 t<br />
Quindi la funzione h () collega X t con le variabili X s ( s t)<br />
, e a tale relazione si aggiunge il<br />
processo A t per rendere la stocasticità il processo (in assenza si tratterebbe né più né meno che di<br />
una funzione deterministica di t). L‟invertibilità diventa particolarmente rilevante nello studio di<br />
alcuni modelli che presenteremo in seguito, ma già da qui si può intuire come possa risultare<br />
importante in un‟ottica di previsione, in effetti si tratta della possibilità di regredire il nostro<br />
processo stocastico sui suoi valori passati.<br />
Esiste anche un‟altra classificazione che distingue i cosiddetti processi periodici.<br />
Formalmente diremo che X t è un processo periodico se esiste un valore s tale che, per ogni t<br />
Pr{ Xt Xts} <br />
1
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Dunque un processo periodico si ripete identicamente dopo s unità temporali. Se questo s è<br />
esattamente parti all‟anno solare ( s 1 per dati annuali, s 2 per dati semestrali, s 4 per dati<br />
trimestrali, e così via) allora diremo che il processo periodico è stagionale.<br />
Esistono altri tipi di classificazione di cui non tratteremo, ad eccezione della proprietà di<br />
ergodicità che verrà presentata in seguito. Tutte queste definizioni fanno riferimento ai processi<br />
stocastici e non alle serie storiche, che ne costituiscono solo una realizzazione finita. Si consideri<br />
però che serie storiche stazionarie sono quelle generate da processi stazionari e che processi<br />
gaussiani producono realizzazioni finite che, statisticamente, possono essere ben approssimate da<br />
distribuzioni Normali, e così via. Tranne l‟invertibilità (che è soprattutto una caratteristica teorica<br />
che viene resa operativa dal problema della previsione) le condizioni di stazionarietà e Normalità<br />
del processo sono in genere agevolmente deducibili dalle serie storiche osservate.<br />
Verifica di Stazionarietà (debole) di un Processo<br />
La funzione di autocovarianza introdotta precedentemente ci fornisce uno strumento teorico<br />
per verificare se un processo stocastico X t sia stazionario o meno. Tale procedura può essere<br />
applicata ai dati della serie storica che noi supponiamo essere la realizzazione finita del processo.<br />
La verifica si articola nei seguenti tre passi:<br />
1. Verificare che il valor medio di X t non dipenda da t<br />
2. Calcolare 0 , ovvero Var( X t ) e verificare che sia finita<br />
3. Verificare che h , per h 1,2,... sia una funzione solo di h e non di t<br />
L‟autocovarianza misura il segno e l‟intensità del legame lineare che intercorre fra X t e<br />
X t hal<br />
variare di h; dunque esprime le connessioni fra le v.c. che compongo il processo stocastico<br />
al variare della distanza tra di esse.<br />
D‟ora in avanti considereremo soddisfatta l‟ipotesi di stazionarietà, la quale verrà sottintesa<br />
e non più ovunque specificata.<br />
Nell‟ottica di poter effettuare dei confronti fra più processi stocastici risulta più comodo<br />
affidarsi alla funzione di autocorrelazione la quale ha un campo di variazione ben definito, a<br />
differenza di quella di autocovarianza che ha come dominio tutto il campo reale. Richiamiamo<br />
quindi tale funzione già definita in precedenza come<br />
{ : h 0, 1, 2,...}<br />
h<br />
Cov( X t, X th )<br />
h<br />
<br />
Var( X ) Var( X )<br />
h h<br />
<br />
<br />
0 0<br />
t th 0
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Questa funzione possiede proprietà notevoli, le più importanti delle quali sono:<br />
1. 0 1 <br />
Si tratta infatti di fare il rapporto tra 0 e sé stesso, inoltre 0 è il coefficiente di<br />
correlazione di X t con sé stesso.<br />
2. h h, per ogni h 0,1,2,...<br />
Difatti, come dimostrato in precedenza, h h per la simmetria della covarianza.<br />
3. h 1,<br />
per ogni h 0,1,2,...<br />
Da un punto di vista statistico, sappiamo che la correlazione è definita nel dominio [ 1,1] .<br />
4. ( aX b) ( X ) , per ogni h 0,1,2,... e per qualsiasi coppia reale ( ab , )<br />
h t h t<br />
Questo poiché essendo<br />
proprietà della covarianza, e dal momento che<br />
proprietà di cui sopra.<br />
Cov aX b aX b a Cov X X a X per le<br />
( t , th) 2<br />
( t, th) 2<br />
h( t )<br />
Var( aX t b) 2<br />
a Var( Xt )<br />
2<br />
a 0(<br />
X t )<br />
segue la<br />
5. La matrice di Toeplitz di ordine m associata alla funzione di autocorrelazione di un<br />
processo stazionario è definita positiva.<br />
Ricordiamo brevemente che la matrice di Toeplitz di ordine m, associata a h , è definita per<br />
ogni m 1,2,3,... come<br />
1 1 2 ... m1<br />
<br />
<br />
1 ... <br />
<br />
1 1 m2<br />
<br />
2 1 1 ... m3<br />
<br />
P( m) [ ], ( i, j) 1,2,..., m<br />
ij <br />
. . . ... .<br />
<br />
. . . ... . <br />
<br />
... 1 <br />
m1 m2 m3<br />
<br />
Si tratta quindi di una matrice simmetrica contenente i valori della funzione di<br />
autocorrelazione fino all‟ordine m 1.<br />
Commentiamo brevemente queste proprietà: la 1. e la 3. affermano che la funzione di<br />
autocorrelazione è normalizzata ad 1 e che questo massimo è raggiunto per h 0 . La 2. mostra<br />
che h è simmetrica, per cui la sua analisi viene sempre intrapresa per valori di h positivi. La<br />
proprietà 4. esplicita che l‟autocorrelazione è invariante per traslazione e cambiamento di scala,<br />
per cui un processo X t può essere studiato sotto l‟unità di misura di volta in volta più
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
conveniente. La 5. enuncia una serie di condizioni necessarie e sufficienti affinché una<br />
{1, , ,..., ,...} sia effettivamente la funzione di autocorrelazione di un processo<br />
successione 1 2<br />
m<br />
stazionario. In altri termini, mentre è necessario che sia verificata la 3. per ogni h affinché h<br />
sia una funzione di autocorrelazione, solo la condizione che la matrice di Toeplitz sia definita<br />
positiva per ogni m garantisce che esista un processo stazionario X t che possegga<br />
{ h, 0,1,2,...} h come propria funzione di autocorrelazione. Come è noto una matrice è<br />
definita positiva se e solo se tutti i minori principali di qualsiasi ordine sono positivi; svolgendo<br />
P definita sopra si nota per m 1,2 non risultano particolari<br />
i calcoli sulla generica matrice ( m)<br />
limitazioni sulla funzione h , mentre invece per m 3 discendono condizioni particolarmente<br />
restrittive. In effetti<br />
P<br />
(1)<br />
10 1 <br />
1 0 1 1<br />
1 2<br />
(2) 11 1<br />
1<br />
P<br />
1<br />
1 2<br />
(3) 1 1 2 2 2<br />
1<br />
P<br />
1 (1 )(1 2 ) 0<br />
<br />
2 1<br />
<br />
1<br />
121<br />
<br />
2<br />
2<br />
21 1<br />
E così via per P( ) 0, m<br />
4,5,... . Si nota quindi subito come, mentre per i primi due<br />
m<br />
ordini le condizioni sono banali o ricalcano altre proprietà, già da m 3 la questione si fa più<br />
complicata. La soluzione della disuguaglianza porta ad un vincolo ben preciso, che restringe in<br />
modo consistente lo spazio di definizione della funzione h (per essere precisi lo restringe<br />
esattamente da un‟area di definizione pari a 4 ad una di 10/3, riducendolo quindi di 1/6; per<br />
rendersene conto basti disegnare negli assi cartesiani ( xy , ) ( 2, 1)<br />
le condizioni per m 2 e<br />
m 3,<br />
ne risulterà un quadrato di lato 2 avente baricentro nell‟origine ed una parabola di vertice<br />
(0, 1) che porta l‟area di definizione a coincidere con la sua intersezione con il quadrato.<br />
Per fare un esempio numerico ed intuitivo, se 1 1 2 0,7071<br />
, allora 2 0 (poiché<br />
dalle condizioni per 3<br />
m risulta che dovrà aversi 2<br />
2<br />
<br />
2 1 2 1 2 1 2 2 1 0).<br />
2 1<br />
Questo è senz‟altro notevole ma risulta comunque ragionevole con riguardo all‟aspettativa che<br />
se la correlazione fra t X e X t<br />
1 (a distanza di una unità temporale l‟una dall‟altra, o 1 lag) è<br />
così elevata (circa 70,71%) risulta ragionevole pensare che la correlazione fra t X e X t<br />
2<br />
(distanti 2 lags) non può essere negativa; questo perché il processo in esame possiede quella<br />
omogeneità temporale che abbiamo identificato come la stazionarietà.<br />
Portiamo ora un semplice esercizio che serva ad applicare le nozioni finora acquisite. Sarà<br />
dato un processo stocastico e dovremo verificarne la stazionarietà e costruirne la matrice di<br />
Toeplitz.
Esempio<br />
e<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Siano e due v.c. Normali, indipendenti, di media zero e varianze, rispettivamente,<br />
2<br />
. Definiamo il processo stocastico<br />
X costsin t,<br />
t 1,2,...<br />
t<br />
In cui 0 2<br />
è un numero reale fissato. Trattandosi di una combinazione lineare di due v.c.<br />
Normali e indipendenti, il processo X t è ben definito e si potrebbe calcolarne la generale<br />
funzione di densità multivariata. Calcoliamone però i primi momenti che, dalla definizione del<br />
processo, risulteranno funzione dei momenti di e .<br />
Ricordiamo che, per ipotesi, vale<br />
E( ) E(<br />
) 0 ;<br />
Cov( , ) E(<br />
, ) 0<br />
Avremo quindi per il processo che<br />
Var( ) <br />
2<br />
;<br />
2<br />
Var( ) <br />
E( X ) cos tE( ) sin tE(<br />
) 0 t<br />
t<br />
2 2 2 2<br />
Var( X t ) cos t sin t t<br />
Cov( X , X ) E[( cos t sin t)( cos ( t h) sin (<br />
t h))]<br />
<br />
t th 2 2<br />
cost cos ( t h) E( ) sint sin (<br />
t h) E(<br />
) <br />
cos t cos ( t h) sin t sin ( t h)<br />
2 2<br />
<br />
Come si vede il valor medio è nullo e quindi costante ma varianza e autocovarianza variano<br />
al variare di t, pertanto, in generale, il processo X t è non stazionario.<br />
2<br />
Se tuttavia supponessimo che Var( ) Var( ) allora le espressioni precedenti<br />
diventerebbero<br />
2 2 2 2<br />
Var( X t ) (cos t sin t) t<br />
Cov X X t t h t t h <br />
2<br />
( t, th ) [cos cos ( ) sin sin (<br />
)]<br />
2 2<br />
cos[ ( )] cos<br />
<br />
t k t h t<br />
In definitiva, se Var( ) Var( ) il nostro processo risulta essere stazionario, dal momento<br />
che valgono la condizione 1. di costanza della media, la 2. di costanza e finitezza della varianza<br />
quale che sia t ed infine la 3., ovvero l‟autocovarianza tra t e t h dipende solamente dal lag e<br />
non dall‟istante temporale t.<br />
Sempre sotto le ipotesi suddette la funzione di autocorrelazione del processo risulterà essere<br />
definita da<br />
2
2<br />
h cos<br />
h<br />
2<br />
cos<br />
0 2<br />
<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
h<br />
cos h,<br />
h0,1,2,3,...<br />
h<br />
h<br />
La funzione è esattamente periodica e risulta evidente come non sia funzione di t ma solo<br />
del lag h.<br />
A conferma della proprietà 5. riguardante la matrice di Toeplitz si osservi che<br />
P<br />
P<br />
(1)<br />
2 2<br />
(2) 1 cos sin 0 <br />
P<br />
(3)<br />
10 1 cos<br />
cos 1<br />
1 cos cos2<br />
2<br />
cos 1 cos (1 cos2 )(1 cos2 2cos ) 0<br />
cos2 cos 1<br />
1<br />
cos20 <br />
<br />
2<br />
1 cos2 2cos 0<br />
<br />
<br />
2<br />
Dal momento che cos2 2cos 1 l‟ultimo sistema è verificato per ogni appartenente<br />
all‟insieme di definizione che abbiamo fornito, ovvero 0 2<br />
.<br />
Stima della Funzione di Autocorrelazione e Concetto di Ergodicità<br />
Dal momento che la funzione di autocorrelazione h è una misura della struttura interna del<br />
processo stazionario X t assume particolare importanza la sua stima statistica a partire da una<br />
realizzazione finita, ovvero la nostra serie storica { xt , t 1,2,..., N}<br />
. Una considerazione va fatta<br />
prima di considerare i metodi di stima: i dati di cui disponiamo costituiscono una informazione<br />
congiunta sulle v.c. ( X1, X 2,...,<br />
X N ) e non sulla generica X t che definisce, al variare di t, il<br />
processo. La serie storica è quindi una successione ordinata di N campioni di dimensione<br />
unitaria su N distinte v.c. le quali, generalmente, fra loro non sono indipendenti né somiglianti.<br />
La complicazione di stima dei parametri di un processo si presenta quindi già nello studio dei<br />
primi momenti; si immagini cosa può succedere passando a intere funzioni dei parametri (quali<br />
ad esempio, appunto, l‟autocorrelazione). Le procedure classiche di stima da un campione non<br />
sono quindi generalmente utilizzabili, ma risulta d‟altra parte intuitivo supporre che, una volta<br />
verificata la stazionarietà del processo in esame, sia ragionevole aspettarsi che si possa<br />
pervenire ad utili informazioni sui parametri delle v.c. componenti il processo tramite le<br />
informazioni contenute nella serie storica, e questo in virtù della “omogeneità temporale” che<br />
identifichiamo con la stazionarietà, che garantisce una certa qual “stabilità” nei legami<br />
temporali fra le variabili.<br />
L‟esigenza di poter giungere a risultati utili disponendo di un insieme limitato di<br />
informazioni (la nostra serie storica) ha portato alla definizione dell‟importantissimo concetto di<br />
ergodicità, termine originario delle scienze fisiche che nello studio dei processi stocastici<br />
assume il seguente significato:
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Definizione: Un processo stocastico X t è ergodico rispetto ad un parametro se la stima<br />
temporale del parametro, ottenuta da una serie storica, converge in media<br />
quadratica a quel parametro.<br />
Formalmente, dato ˆ( X T ) T 1,2,..., N stimatore del vero parametro e funzione dei dati della<br />
serie storica, diremo che la condizione di ergodicità è verificata qualora<br />
ˆ<br />
2<br />
lim E[ ( XT)<br />
] 0<br />
T<br />
Cos‟è dunque l‟ergodicità? Può essere intesa come una condizione che limita la memoria del<br />
processo: un processo non ergodico è tale da avere caratteristiche di persistenza così accentuate<br />
da far sì che un segmento del processo (nel nostro caso la serie storica) per quanto lungo, sia<br />
insufficiente a dire alcunché sulle sue caratteristiche distributive. In un processo ergodico, al<br />
contrario, la memoria del processo può essere intesa debole su lunghi orizzonti e all‟aumentare<br />
dell‟ampiezza del campione aumenta in modo significativo anche l‟informazione in nostro<br />
possesso. La considerazione che possiamo fare è quella di reputare virtualmente indipendenti<br />
eventi distanti tra di loro sull‟asse temporale in caso di ergodicità: sotto una simile ipotesi<br />
possiamo supporre possibile l‟osservazione di una parte consistente delle traiettorie che il<br />
processo può generare posta una evidenza campionaria sufficientemente grande. Formalmente<br />
la considerazione enunciata poco fa sull‟incorrelazione di eventi distanti nel tempo si traduce<br />
nella seguente condizione necessaria e sufficiente affinché il processo sia ergodico rispetto al<br />
valor medio è che la sua funzione di autocorrelazione tenda a zero al crescere del lag h.<br />
Esiste inoltre un teorema (detto appunto ergodico) che garantisce che se un processo è ergodico<br />
l‟osservazione di una sua realizzazione “abbastanza” lunga è equivalente, per i fini inferenziali,<br />
all‟osservazione di un grande numero di osservazioni.<br />
In linea generale possiamo dire che solo per processi ergodici e stazionari (nota: la<br />
stazionarietà non implica l‟ergodicità! ne è una prova l‟esempio di prima, in cui il processo era<br />
sì stazionario, ma la sua funzione di autocorrelazione era periodica e non tendeva a zero al<br />
divergere del lag) può porsi correttamente il problema dell‟inferenza statistica sulle serie<br />
storiche. L‟ergodicità garantisce che dall‟unica informazione disponibile, appunto le<br />
osservazioni che compongono la nostra serie storica, sarà possibile risalire a stime consistenti in<br />
senso statistico del processo stazionario X t .<br />
D‟ora in avanti supporremo che i processi con cui lavoreremo siano stazionari ed erodici<br />
fino almeno ai momenti del secondo ordine, di modo da dare un senso all‟approccio<br />
inferenziale.<br />
Passiamo dunque alla stima vera a propria della funzione di autocorrelazione h h 0 . Si<br />
tratta semplicemente di trovare uno stimatore soddisfacente per , 0,1,2,... e di lì ricavare<br />
. Premettiamo che per stimare il valor medio del processo EX ( ) impiegheremo la<br />
h<br />
media campionaria<br />
N<br />
t<br />
t1<br />
asintoticamente normale. Si noti però che la varianza di tale stimatore, che solitamente vale<br />
2<br />
N , viene ad essere alterata da un fattore moltiplicativo a causa della correlazione esistente<br />
h h<br />
x X N , il quale, come è noto, è non distorno, consistente ed<br />
fra le X t .<br />
Per comodità di notazione considereremo il processo scarto Zt Xt , il quale possiede<br />
media nulla e la stessa varianza, autocovarianza e autocorrelazione di X t ( trattandosi di una<br />
t
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
semplice traslazione). In letteratura sono stati proposti diversi stimatori dell‟autocovarianza, fra<br />
i quali citiamo<br />
ˆ <br />
ˆ <br />
ˆ <br />
1<br />
N<br />
(1)<br />
h ZZ t th N t1<br />
1<br />
Nh (2)<br />
h ZZ t th N h t1<br />
1<br />
Nh (3)<br />
h ZZ t th N t1<br />
Lo stimatore per l‟autocorrelazione sarà in ogni caso<br />
ˆ ih , i 1,2,3<br />
ˆ <br />
i h<br />
i<br />
0<br />
(1) ˆ h è dotato di notevoli proprietà teoriche, ma implica una condizione molto<br />
Lo stimatore<br />
restrittiva per il suo utilizzo, ovvero il processo deve ripetersi esattamente dopo N unità<br />
temporali, cioè deve essere del tipo ZN 1 Z1, ZN 2 Z2,..., ZN i<br />
Zi,...<br />
.<br />
Per quanto riguarda gli altri due stimatori si osservi che per N elevato rispetto a k vale<br />
(3) (2) ˆ ˆ , dunque la differenza risulta evidente solo nei piccoli campioni. E‟ stato dimostrato<br />
h h<br />
inoltre che<br />
(2) ˆ h è stimatore corretto per h ma<br />
(3) ˆ h , pur essendo distorto, garantisce un errore<br />
(2) ˆ h , risultando dunque più efficiente e, soprattutto,<br />
quadratico medio inferiore a quello di<br />
verifica la condizione per la quale P ˆ<br />
( m)<br />
, ovvero la matrice di Toeplitz stimata, è definita<br />
positiva, proprio come P ( m)<br />
; questo non avviene necessariamente costruendo P ˆ<br />
( m)<br />
con lo<br />
(2) ˆ h . Per questi motivi di norma la preferenza cade su<br />
stimatore<br />
funzione di autocorrelazione nel modo seguente:<br />
N hNh <br />
Z Z ( X x)( X x)<br />
ˆ <br />
ˆ , h 0,1,2,...<br />
(3)<br />
t thtth h t1 t1<br />
h (3) ˆ 0<br />
N<br />
2<br />
Zt N<br />
(<br />
X t<br />
2<br />
x)<br />
t1 t1<br />
(3) ˆ h e dunque si stima la<br />
Lo stimatore è simmetrico ( ˆ ˆ h h) e pertanto la stima viene effettuata solo per h positivo.<br />
In pratica come si procede? Nota la serie storica ( x1, x2,..., x N ) si costruisce la serie degli<br />
scarti z1 x1 x, calcola<br />
z2 x2 x, ..., zN xN x (dove x è la usuale media campionaria) quindi si<br />
Nh 1<br />
ˆ z z , h 0,1,2,...<br />
<br />
h t th N t1
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
fino ad un lag massimo che l‟esperienza pone pari a N 4 o al suo intero successivo. Fatto<br />
questo si costruiscono i rapporti ˆ ˆ ˆ<br />
h h 0 per h 0,1,2,..., N 4 e si riportano su di un grafico<br />
denominato correlogramma, solitamente a barre verticali per ciascun h per sottolineare che si<br />
tratta di stime in punti discreti; talvolta si uniscono i punti della funzione di autocorrelazione per<br />
evidenziarne l‟andamento complessivo.<br />
Esempio<br />
Sia xt (8.5, 10.3, 9.6, 8.7, 11.2, 9.9, 7.9, 10.9, 11.1, 10.4) la nostra serie storica il cui<br />
grafico è illustrato di qui di seguito<br />
e la quale media campionaria vale x 9.79 (tratteggiata nel grafico). La serie degli scarti è<br />
z ( 1.35, 0.45, 0.25, 1.15, 1.35, 0.05, -1.95, 1.05, 1.25, 0.55) . Dal momento che<br />
t<br />
N=10 N4 2.5 dunque avrà senso calcolare ˆ h solo per h 0,1,2,3 . Dunque<br />
1 1<br />
ˆ 0 <br />
N<br />
N<br />
10<br />
2 2<br />
zi zi<br />
i1 10 t1<br />
1 1.82250.20250.06251.32251.8225 <br />
10 0.0025 3.8025 1.1025 1.5625 0.3025<br />
<br />
1<br />
12.005 1.2<br />
10<br />
N 1<br />
9<br />
1 1<br />
ˆ z z z z <br />
<br />
1 t t1tt1 N i1 10 t1<br />
1 0.60750.11250.28751.55250.0675 <br />
10 0.0975 2.0475 1.3125 0.6875<br />
<br />
1<br />
2.0625 0.21<br />
10
N 2<br />
8<br />
1 1<br />
ˆ z z z z <br />
<br />
2 t t2tt2 N i1 10 t1<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
1 0.33750.51750.33750.0575 <br />
10 2.6325 0.0525 2.4375 0.5775<br />
<br />
1<br />
5.015 0.5<br />
10<br />
N 3<br />
7<br />
1 1<br />
ˆ z z z z <br />
<br />
3 t t3 t 3<br />
N i1 10 t1<br />
1 1.55250.60750.01252.2425 <br />
10 1.4175 0.0625 1.0725<br />
<br />
1<br />
4.7975 0.48<br />
10<br />
Dunque le stime della funzione di autocorrelazione saranno:<br />
ˆ ˆ ˆ 1<br />
0 0 0<br />
ˆ ˆ ˆ 0.21 1.2 0.18<br />
1 1 0<br />
ˆ ˆ ˆ 0.5 1.2 0.42<br />
2 2 0<br />
ˆ ˆ ˆ 0.48 1.2 0.40<br />
3 3 0<br />
Il correlogramma sarà quindi, per i lags h 0,1,2,3 , il seguente:<br />
Le linee tratteggiate delimitano la regione di confidenza approssimata per l‟ipotesi<br />
0 : H Xt WN e si ottengono da 2 N 2 10 0.6325 . In ambiente R, ovvero il software<br />
impiegato per tracciare questi grafici, tale precisazione viene eseguita in automatico nel<br />
momento del calcolo della funzione di autocorrelazione; le bande così ampie, che porterebbero a<br />
non poter rifiutare l‟ipotesi di cui sopra, sono dovute ad un N così piccolo.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Passiamo ora a parlare di un altro importantissimo strumento dell‟analisi dei processi<br />
stazionari, ovvero la funzione di autocorrelazione parziale, il cui ruolo fondamentale risulterà<br />
più chiaro nel seguito, quando tratteremo dei cosiddetti modelli autoregressivi.<br />
Definiamo quindi la funzione di autocorrelazione parziale h al lag h, per h 0, 1, 2,... ,<br />
come la correlazione esistente fra t X e X t h al netto della correlazione esistente fra le v.c.<br />
“intermedie” tra t X e X t h.<br />
Se la definizione può risultare di non semplicissima comprensione, la forma analitica della<br />
funzione è estremamente semplice: la funzione di autocorrelazione parziale è data dal rapporto<br />
fra due determinanti<br />
Con<br />
P<br />
( h)<br />
P<br />
*<br />
( h)<br />
*<br />
P(<br />
h)<br />
h , h 0,1,2,...<br />
P<br />
( h)<br />
1 1 2 ... h1<br />
<br />
<br />
1 ... <br />
<br />
1 1 h2<br />
<br />
2 1 1 ... h3<br />
<br />
;<br />
<br />
. . . ... .<br />
<br />
. . . ... . <br />
<br />
... 1 <br />
h1 h2 h3<br />
<br />
1 1 2 ... 1<br />
<br />
<br />
1 ... <br />
<br />
1 1 2 <br />
2 1 1 ... 3<br />
<br />
<br />
<br />
. . . ... .<br />
<br />
. . . ... . <br />
<br />
... <br />
h1 h2 h3 h <br />
Dove P ( h)<br />
è la matrice di Toeplitz di ordine h, mentre<br />
P è la stessa matrice alla cui ultima<br />
colonna è stato sostituito il vettore composto dai valori della funzione di autocorrelazione fino al<br />
lag h. Dalla proprietà di simmetria di h discende anche quella di h , difatti vale h h,<br />
quindi anche in questo caso i calcoli verranno effettuati esclusivamente per valori positivi di h.<br />
E‟ ovviamente vero che 0 1 , mentre applicando la definizione per h 1,2,3 otteniamo:<br />
1<br />
1 1<br />
1<br />
<br />
1<br />
1<br />
2 <br />
1<br />
1<br />
2<br />
1 <br />
2<br />
2 1<br />
2<br />
1<br />
1<br />
1<br />
<br />
<br />
<br />
1<br />
*<br />
( h)
1<br />
1 1<br />
1 <br />
1 2<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
1 2 2<br />
<br />
2<br />
2 <br />
<br />
2 1 3 3 1 1 1 2 2<br />
3 <br />
2 2<br />
1 1 2 1 1 1 2 21<br />
1 <br />
1 1<br />
2 1<br />
<br />
<br />
<br />
1<br />
<br />
Risultano inoltre univocamente determinabili i valori della funzione di autocorrelazione in<br />
funzione delle autocorrelazioni parziali fino allo stesso lag h:<br />
<br />
1 1<br />
1 <br />
<br />
2 2<br />
2<br />
1 2<br />
2 2 3<br />
2<br />
1 1 1 2 <br />
<br />
3 3 2 1 1 2 1 2 2<br />
E‟ possibile (per quanto non immediato) ricavare una forma analitica generale in modo da<br />
esplicitare h in funzione di h, h<br />
1,..., 1<br />
e viceversa; tale problema è sempre risolubile, per<br />
quanto non molto semplice.<br />
Come si può vedere dalla teoria esposta sino a qui h e h sono l‟una funzione dell‟altra:<br />
h non aggiunge nulla sulla conoscenza del processo che non sia già teoricamente deducibile da<br />
h ; come già accennato l‟importanza della funzione di autocorrelazione parziale risulterà<br />
evidente più avanti, nell‟ambito della stima dei modelli autoregressivi.<br />
Per quanto riguarda la stima della funzione di autocorrelazione parziale il metodo più<br />
immediato consiste nel ricavare le stime di h , ad esempio tramite lo stimatore introdotto<br />
prima, ed andarle a sostituire all‟interno delle matrici definite sopra, di modo da ottenere<br />
*<br />
Pˆ<br />
( h)<br />
ˆ h , h 0,1,2,...<br />
Pˆ<br />
( h)<br />
ˆ *<br />
P ( h)<br />
e P ˆ<br />
( h)<br />
sono, rispettivamente, la matrice di Toeplitz e la stessa modificata di cui già si è<br />
parlato, nelle quali sono stati inseriti i valori stimati della funzione di autocorrelazione.<br />
Analogamente al caso della funzione di autocorrelazione si rappresenta graficamente anche<br />
ˆ h per lo stesso numero di lags per cui è stata stimata h . Tale grafico viene denominato<br />
talvolta come correlogramma parziale.<br />
Esempio<br />
Riprendiamo i dati derivati dalla serie storica dell‟esempio precedente, per la quale avevamo<br />
già stimato i valori della funzione di autocorrelazione fino al lag h 3.
1 1 0<br />
2 2 0<br />
3 3 0<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
ˆ ˆ ˆ 0.21 1.2 0.18<br />
ˆ ˆ ˆ 0.5 1.2 0.42<br />
ˆ ˆ ˆ 0.48 1.2 0.40<br />
Procedendo con i calcoli e sfruttando i risultati presentati in precedenza otteniamo le stime<br />
dell‟autocorrelazione parziale:<br />
ˆ 1<br />
ˆ ˆ<br />
1 1<br />
0.18<br />
1<br />
1 ˆ 1<br />
ˆ <br />
ˆ <br />
ˆ ˆ 0.42 ( 0.18)<br />
0.468<br />
2 2<br />
1 2 2 1<br />
2<br />
1 ˆ 1 2<br />
1 ˆ 1<br />
2<br />
1 ( 0.18)<br />
ˆ 1<br />
1<br />
1 ˆ 1 ˆ 1<br />
ˆ 1 1 ˆ 2<br />
ˆ <br />
ˆ <br />
ˆ ˆ <br />
<br />
ˆ ˆ ˆ ˆ ˆ <br />
<br />
1 2 2<br />
<br />
2<br />
2 <br />
1 1 2 <br />
2 1 3 3 1 1 1 2 2<br />
3<br />
1 ˆ 1 ˆ 2 2 ˆ 1 ˆ 2 2 ˆ 1<br />
ˆ 1 1 ˆ 1<br />
ˆ ˆ 1<br />
2 1<br />
<br />
2 <br />
2<br />
<br />
2<br />
<br />
2 2<br />
1 ( 0.18) 1 ( 0.42) 2( 0.18)<br />
<br />
0.40 1 ( 0.18) 0.18 ( 0.18) ( 0.42) 2( 0.42)<br />
0.398<br />
Come si può notare le stime delle due funzioni sono praticamente coincidenti, a meno di<br />
approssimazioni minime. Nel grafico che segue è riportato il correlogramma parziale del<br />
processo sulla base della serie storica data.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Anche in questo caso sono presenti i limiti approssimati della regione di confidenza al 95%<br />
H X WN . La costruzione è analoga a quella relativa alla funzione di<br />
per l‟ipotesi 0 : t<br />
autocorrelazione, le bande di confidenza sono poste a 2 N 2 10 0.6325 intorno allo<br />
zero; chiaramente nel nostro caso tale specificazione è superflua, dal momento che la serie<br />
storica che è stata impiegata per l‟esercizio è artificiale.<br />
La Classe dei Modelli ARMA<br />
Come si è già visto in precedenza lo scopo dell‟analisi delle serie storiche è quella di risalire<br />
ai processi stocastici che si suppone le abbiano generate; operativamente questo si traduce<br />
nell‟identificazione e nella stima di modelli statistici che garantiscano un accettabile grado di<br />
approssimazione della realtà in esame. Dunque dai dati non si perviene al processo bensì se ne<br />
costruisce una descrizione valida sino a prova contraria: una sintesi cioè ottimale solo fino a che<br />
nuovi dati non porteranno a costruire modelli più convincenti. In generale la conoscenza di un<br />
processo a partire dai dati è proibitiva, dunque si ripiega su di un particolare modello: il<br />
processo stocastico genera la serie storica quale sua realizzazione finita, il modello statistico si<br />
adegua alla serie storica secondo criteri di ottimalità e genera dati che sono simulazioni ottenute<br />
dal modello. Nel seguito presenteremo una classe di modelli statistici che trova il suo impiego<br />
nella descrizione dei processi stocastici, i modelli ARMA. Il passo seguente all‟identificazione è<br />
chiaramente costituito dalla validazione del modello scelto tramite opportune verifiche di<br />
ipotesi; una volta assicurata la bontà del modello si può infine passare alla previsione.<br />
Il Processo a Media Mobile<br />
Sia A t un processo white noise come già definito in precedenza e si consideri il seguente<br />
processo stocastico<br />
Yt At At dove , . Questa serie storica è definita processo a media mobile del primo ordine, e si<br />
indica con MA (1) . Il termine “media mobile” deriva dal fatto che Y t è costruito da una somma<br />
pesata, simile ad una media, dei due più recenti valori di A .<br />
Il valore atteso di Y t è dato da<br />
<br />
E Y E A A E A E A <br />
t t t1 t t1<br />
dal momento che abbiamo definito A t come un white noise, e quindi a media nulla per ogni t.<br />
La varianza di Y t , che coincide chiaramente con la funzione autocovarianza calcolata per un<br />
lag nullo, vale<br />
2 2 2 2 2<br />
t t t1 t 2<br />
t t1 t1<br />
<br />
E Y E A A E A A A A <br />
2 2 2<br />
0 <br />
1 <br />
<br />
2 2<br />
0<br />
1
La prima autocovarianza è<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
<br />
E Y Y E A A A A <br />
t t1 t t1 t1 t2<br />
2 2 2<br />
t t1 t1 t t2 t1 t2<br />
<br />
E A A A A A A A <br />
0 0 0 <br />
2 2<br />
1<br />
Le autocovarianze di ordine superiore sono tutte identicamente nulle.<br />
Dal momento che la media e le autocovarianze non sono funzioni del tempo t, un processo<br />
MA (1) à stazionario quale che sia il valore di . Inoltre è chiaramente soddisfatta la seguente<br />
condizione di ergodicità rispetto alla media<br />
<br />
h<br />
<br />
,<br />
difatti h<br />
2 2 2<br />
1 <br />
<br />
h0<br />
h0<br />
supponendo finito (ed è una assunzione quasi scontata, altrimenti non avrebbe senso la<br />
2<br />
costruzione di un modello) e sapendo che è finito poiché stiamo considerando un disturbo di<br />
tipo white noise (analogo è il discorso sulla condizione di asintoticità verso lo zero: dal<br />
momento che h 0, h 1 è verificata anche quest‟ultima). Inoltre se supponiamo che il<br />
processo di rumore bianco sia anche gaussiano, allora l‟ergodicità è valida con rispetto a tutti i<br />
momenti.<br />
La funzione di autocorrelazione è pari all‟unità per h 0 , mentre per h 1 vale<br />
<br />
2<br />
1 <br />
1 <br />
2 2<br />
2<br />
0 1<br />
1 <br />
le autocorrelazioni di ordine superiore sono tutte identicamente nulle ed è possibile<br />
rappresentare h in un correlogramma.<br />
E‟ interessante notare come esistano sempre due distinti valori di tali da restituire il<br />
medesimo valore della funzione di autocorrelazione. Difatti se andiamo a sostituire a il valore<br />
1 notiamo che<br />
<br />
<br />
<br />
<br />
2<br />
11 <br />
11 11 1<br />
<br />
1 2<br />
2<br />
2<br />
2<br />
Per esempio, i processsi Yt autocorrelazione data da<br />
At 0.5At<br />
1<br />
e Yt At 2At<br />
1<br />
hanno la medesima funzione di<br />
2 0.5<br />
1 0.4<br />
2 2<br />
1210.5
Il grafico di 1<br />
2<br />
1<br />
è il seguente:<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Sono stati simulati quattro processi a media mobile del primo ordine sotto ipotesi di media<br />
nulla e con rumore bianco gaussiano (la stazionarietà non è richiesta in quanto sempre<br />
verificata); di seguito le rappresentazioni grafiche delle serie storiche per un totale di 300<br />
realizzazioni, con i rispettivi correlogrammi (ACF) e correlogrammi parziali (Partial ACF).<br />
Le funzioni di autocorrelazione (ACF) mostrano come, dopo il primo lag, i valori possano<br />
ritenersi ragionevolmente nulli (dal momento che non superano le bande di confidenza; è<br />
accettabile inoltre un valore “anomalo” ogni 20 lag, purché superi in modo non significativo i<br />
valori limite). Questo significa che abbiamo a che fare con modelli a media mobile di ordine 1<br />
(come in effetti sono per costruzione); la vera utilità di questo genere di considerazioni grafiche<br />
risiede nel fatto che nella cosiddetta fase di identificazione dei modelli possiamo essere in<br />
grado, semplicemente costruendo i correlogrammi campionari dalla nostra serie storica, di<br />
orientarci verso un tipo di modello o verso un altro a seconda della “forma” della funzione di<br />
autocorrelazione .<br />
Le funzioni di autocorrelazione parziale (Partial ACF), invece, mostrano un andamento<br />
decrescente e convergente verso lo zero: questo è tipico dei modelli a media mobile.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Definiamo ora il processo a media mobile di ordine q, che indicheremo con MA( q ) , nel<br />
seguente modo:<br />
Y A A A A<br />
t t 1 t1 2 t2 ... q<br />
tq Ovvero estendiamo ad un numero di q termini la somma pesata dei white noise che riteniamo<br />
descrivano la nostra Y t . In pratica viene aumentato il peso delle informazioni fornite dai disturbi<br />
più lontani nel tempo, fino ad un lag, appunto, pari a q. MA (1) è chiaramente un caso<br />
particolare di processo a media mobile di ordine q nel quale i pesi j risultino pari a zero per<br />
j 1.<br />
Calcoliamo il valore atteso del processo<br />
La varianza sarà<br />
t t 1 t1 2 t2 ... q<br />
tq <br />
E At 1EAt1... qE At<br />
q<br />
E Y E A A A A <br />
<br />
2<br />
2<br />
<br />
0 E Yt E At 1At 1 2At 2 ... q At<br />
q<br />
dal momento che, per ipotesi, i rumori bianchi sono incorrelati tra di loro la varianza della<br />
somma sarà semplicemente pari alla somma delle varianze, ovvero<br />
<br />
... 1 ... <br />
2 2 2 2 2 2 2 2 2 2 2<br />
0 1 2 q 1 2<br />
q<br />
Si ricava inoltre (non lo dimostriamo ma è semplice ottenerlo) che<br />
2<br />
h h h q qh 1 1 2 2 ... h1,2,..., q<br />
h <br />
0<br />
hq Per esempio in un processo MA (3) avremo che:<br />
1 <br />
<br />
<br />
2 2 2 2<br />
0 1 2 3<br />
<br />
2<br />
2<br />
2<br />
<br />
<br />
1 1 2 1 3 2<br />
<br />
2 2 3 1<br />
<br />
3 3<br />
... 0<br />
4 5<br />
La funzione di autocorrelazione segue automaticamente rapportando i valori di h alla<br />
varianza, ed è identicamente nulla per h q,<br />
dunque anche il processo MA( q ) risulta essere<br />
stazionario, quali che siano i valori dei parametri j ; inoltre, come già per il processo di ordine
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
1, se il disturbo è di tipo white noise gaussiano è rispettata anche l‟ergodicità rispetto a tutti i<br />
momenti.<br />
Di seguito quattro esempi di processo (2)<br />
MA ; le considerazioni sono le medesime già fatte<br />
per il caso del modello a media mobile di primo ordine e ancora una volta supponiamo valor<br />
medio nullo e disturbi di tipo white noise gaussiano.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
Il processo MA( q ) può essere scritto come<br />
Si consideri cosa succede quando q :<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Y A , 1<br />
t j t j<br />
j0<br />
q<br />
<br />
<br />
Y A A A A ...<br />
<br />
t j t j 0 t 1 t1 2 t2<br />
j0<br />
Questo può essere considerato un processo MA( ) , che risulta essere stazionario se è verificata<br />
la seguente condizione:<br />
<br />
<br />
j0<br />
<br />
2<br />
j<br />
<br />
Spesso si considera la condizione leggermente più restrittiva<br />
Una sequenza di coefficienti j<br />
j<br />
0<br />
<br />
<br />
<br />
j0<br />
<br />
j<br />
<br />
0<br />
che rispetti le condizioni sopraelencate viene definita,<br />
rispettivamente, di quadrato sommabile e assolutamente sommabile. Questo garantisce anche<br />
che sia rispettata la condizione di ergodicità rispetto alla media (<br />
<br />
<br />
h0<br />
<br />
h<br />
),<br />
in effetti anche le<br />
covarianze sono assolutamente sommabili. Il valor medio del processo MA( ) rimane<br />
comunque , mentre i momenti di ordine superiore basta far tendere ad infinito l‟ordine q nelle<br />
espressioni già ricavate e calcolare il limite.<br />
Il Processo Autoregressivo<br />
Un processo autoregressivo del primo ordine, indicato con AR (1) , soddisfa la seguente<br />
equazione:<br />
Y c Y A<br />
t t1 t<br />
Ancora una volta A t è il rumore bianco che soddisfa tutte le proprietà già discusse e c, .<br />
Come si può vedere si tratta di una equazione alle differenze finite di ordine 1, ed è noto<br />
dalla teoria che se 1 la conseguenza degli t A sulla Y t tenderanno ad accumularsi nel tempo<br />
piuttosto che tendere a zero. Dovrebbe risultare dunque sufficientemente intuitivo comprendere<br />
la seguente affermazione: qualora 1,<br />
allora non esiste un processo stazionario Y t che<br />
soddisfi l’equazione Yt Yt1 At<br />
.<br />
In caso invece sia 1,<br />
allora esiste un processo stazionario Y t che soddisfi l‟equazione e<br />
che sarà dato dalla soluzione stabile
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
1 2<br />
2 3<br />
3<br />
<br />
c1 <br />
A A<br />
2<br />
A<br />
3<br />
A ...<br />
Y c A c A c A c A ... <br />
t t t t t<br />
tt1<br />
t2 t3<br />
<br />
j<br />
Tale soluzione può essere vista come un processo MA( ) con . Qualora la condizione<br />
1 sia soddisfatta, allora avremo<br />
j 1<br />
<br />
1<br />
<br />
<br />
<br />
j<br />
j0 j0<br />
La convergenza di questa serie garantisce l‟esistenza della rappresentazione MA( ) e<br />
l‟ergodicità rispetto alla media del processo AR (1) .<br />
Calcolando il valore atteso della soluzione otteniamo che<br />
Dunque la media di un processo (1)<br />
La varianza invece è<br />
mentre la h-esima autocovarianza vale<br />
<br />
E Yt c1 0 0 ...<br />
AR stazionario vale c 1 <br />
.<br />
t<br />
2<br />
t t1 2<br />
t2 3<br />
t3<br />
... <br />
2 4 6 2<br />
1 ... <br />
<br />
2<br />
<br />
2 1 0<br />
E Y E A A A A <br />
t th t t1 2<br />
t2 ...<br />
h<br />
th h1 th 1 h2<br />
th 2<br />
... <br />
2<br />
At h Ath1 At<br />
h2 ... <br />
E Y Y E A A A A A A <br />
<br />
<br />
<br />
<br />
h h2h4 2<br />
... <br />
<br />
<br />
<br />
<br />
h 2 4 2<br />
1 ... <br />
1 <br />
<br />
<br />
<br />
h 2 2<br />
h<br />
Segue immediatamente l‟espressione della funzione di autocorrelazione, pari a<br />
0<br />
<br />
<br />
<br />
<br />
h 2 2 h 2 2<br />
<br />
11 h<br />
h<br />
h <br />
<br />
2 2 2 2<br />
11 j<br />
2
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
la quale rispetta la condizione di convergenza a 0, sotto ipotesi di stazionarietà, dal momento<br />
che si è supposto 1.<br />
Sono stati simulati quattro processi autoregressivi del primo ordine sotto ipotesi di<br />
stazionarietà, media nulla e con rumore bianco gaussiano; di seguito le rappresentazioni<br />
grafiche delle serie storiche per un totale di 300 realizzazioni, con i rispettivi correlogrammi<br />
(ACF) e correlogrammi parziali (Partial ACF).<br />
Si noti come le funzioni di autocorrelazione decrescono progressivamente e lentamente<br />
verso lo zero (l‟alternanza dei segni dipende unicamente dal segno del parametro ), questa è<br />
una caratteristica tipica dei processi di tipo AR ; le funzioni di autocorrelazione parziale invece<br />
presentano un solo valore significativamente al di fuori delle bande di confidenza, il primo,<br />
questo ci fornisce l‟indicazione che si tratti di processi del primo ordine. Nelle Partial ACF i<br />
valori successivi al primo non sono nulli come vorrebbe la teoria, ma questo è imputabile al<br />
caso, possiamo accettare l‟ipotesi di in correlazione temporale per lag superiori a 1 dal<br />
momento che, appunto, i valori della funzione non superano le bande di confidenza (è<br />
accettabile inoltre un valore “anomalo” ogni 20 lag, purché superi in modo non significativo i<br />
valori limite)
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Cosa succede però se la condizione di stazionarietà non è rispettata (ovvero se il parametro è<br />
tale che 1)?<br />
Il processo esplode. Nel grafico che segue sono state rappresentate le<br />
simulazioni di due processi autoregressivi con parametri superiori in modulo a 1, seppure di<br />
pochissimo.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Chiaramente la stazionarietà non è più rispettata, e sebbene le funzioni di autocorrelazione<br />
ed autocorrelazione parziale conservino un andamento che potremmo definire “ideale”, risulta<br />
evidente come l‟esplosione dei valori renda il modello assolutamente instabile.<br />
Analogamente al caso del processo a media mobile, possiamo estendere il concetto di<br />
autoregressione ad ordini superiori; rendiamo, cioè, significative informazioni sul processo più<br />
lontane nel tempo, fornendo loro pesi non nulli.<br />
Si definisce processo autoregressivo di ordine p e si indica con AR( p ) il seguente:<br />
Y c Y Y Y A<br />
t 1 t1 2 t2 ... p t p t<br />
Ovvero estendiamo ad un numero di p termini la somma pesata dei valori passati della nostra Y t ,<br />
con l‟aggiunta di un termine di disturbo white noise A t . Risulta evidente come il processo<br />
AR (1) presentato in precedenza altro non sia che un caso particolare di quest‟ultimo, con 0<br />
per 1<br />
j .<br />
A differenza del processo a media mobile, come si è già detto, la stazionarietà non è<br />
necessariamente rispettata; dobbiamo dunque imporre delle condizioni sui parametri del<br />
j
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
modello. In particolare richiederemo che i coefficienti j associati alle radici dell‟equazione<br />
omogenea associata<br />
2<br />
p<br />
1 12... p<br />
0<br />
siano tali da garantire che 1 j . In questo caso il processo non esplode e si mantiene<br />
j<br />
stazionario.<br />
Nel caso di un processo AR (2) questa condizione è graficamente rappresentabile in modo<br />
comprensibile; si tratta infatti della condizione che i due parametri 1 e 2 si trovino all‟interno<br />
del triangolo tratteggiato nella figura sottostantante.<br />
Sotto l‟ipotesi di stazionarietà il valore atteso del processo è:<br />
c<br />
EY <br />
t 1 ... <br />
1 2<br />
e sfruttando questa espressione l‟equazione che descrive il processo può essere riscritta nel<br />
modo seguente:<br />
<br />
Y Y Y Y A<br />
t 1 t 1 2 t 2 ... p t p t<br />
Le autocovarianze si possono quindi ottenere semplicemente moltiplicando ambo i membri<br />
Y e prendendone i valori attesi; ne risulta che:<br />
dell‟ultima equazione per <br />
th 1 h1 2 h2 ... p h p h 1,2,...<br />
h <br />
2<br />
1 1 2 2 ... pp h 0<br />
p<br />
) questo<br />
Sfruttando la nota proprietà di simmetria della funzione di autocovarianza ( h h<br />
sistema di equazioni può essere risolto per<br />
2<br />
0, 1,..., p in funzione di , 1, 2,..., p . Per<br />
ricavare la funzione di autocorrelazione basterà dividere per 0 , quindi:
chiaramente 0 1 .<br />
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
<br />
h 1 h1 2 h2 ... p h p<br />
L‟espressione precedente, esplicitata per h 1,2,... , dà origine al cosiddetto sistema di<br />
equazioni di Yule-Walker, che costituisce lo strumento fondamentale per la stima dei parametri<br />
del modello autoregressivo. Come già detto è possibile, noti che siano i parametri e la varianza<br />
del disturbo, stimare i valori della funzione di autocovarianza (e quindi di autocorrelazione); ciò<br />
che risulta invece di effettivo interesse operativo è proprio l‟operazione inversa, in effetti noi<br />
disponiamo della serie storica dei dati dalla quale, come si è già mostrato negli esempi, si<br />
possono stimare i valori della funzione di autocorrelazione. Tramite il sistema di equazioni di<br />
Yule-Walker abbiamo quindi la possibilità di stimare i parametri (ignoti) del modello<br />
autoregressivo che meglio approssimi il processo stocastico (a tutti gli effetti inconoscibile nella<br />
sua completezza) di cui la serie storica rappresenta una realizzazione finita.<br />
Il sistema di equazioni di Yule-Walker si presenta in forma lineare per il processo<br />
autoregressivo, e può essere esplicitato come segue:<br />
1 1 2 1 3 2 ... <br />
pp1 <br />
2 11 2 3 1 ... <br />
pp2 <br />
<br />
.....<br />
<br />
.....<br />
<br />
p 1 p1 2 p2 3 p3 ... <br />
<br />
p<br />
Dunque potremo sostituire ai valori j le loro stime ˆ j ottenute dalla serie storica, ed<br />
ottenere quindi le stime ˆ j dei parametri del modello. Si noti inoltri che la soluzione è unica, dal<br />
momento che la matrice del sistema altro non è che la matrice di Toeplitz di ordine p, P ( p)<br />
, la<br />
quale è definita positiva per ogni p quando il processo è stazionario.<br />
L‟approccio di Yule-Walker per la stima dei parametri è applicabile anche ai processi a<br />
media mobile, si ricava però un sistema non lineare di equazioni, che richiede una procedura di<br />
calcolo iterativa particolare. Risulta così più laborioso determinare le stime ˆ j, j 1,2,..., q in<br />
base a stime delle autocorrelazioni ˆ j, j 1,2,..., q determinate dall‟evidenza campionaria (la<br />
nostra serie storica).<br />
Seguono alcuni esempi di processi autoregressivi del secondo ordine; le considerazioni sono<br />
esattamente le stesse già presentate per quelli del primo ordine (stazionarietà, media nulla,<br />
disturbo white noise gaussiano). Le quattro simulazioni sono state effettuate con alternanza di<br />
segni dei parametri 1, 2 per rendere evidenti le differenti forme delle funzioni di<br />
autocorrelazione.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Abbiamo presentato in precedenza la condizione affinché un processo autoregressivo del<br />
, si trovi all‟interno del<br />
secondo ordine sia stazionario, ovvero che il punto di coordinate 1 2<br />
triangolo tratteggiato in figura. Analogamente al caso dei processi di tipo AR 1 anche quelli di<br />
ordine superiore esplodono qualora non siano rispettate le condizioni sui parametri, ne vediamo<br />
di seguito qualche esempio grafico:
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Volendo riassumere brevemente quanto detto finora possiamo sottolineare il carattere di<br />
dualità tra i processi AR e MA .<br />
I processi di tipo AR rispondono al tentativo di spiegare il presente in funzione del<br />
passato, fino ad una certa “distanza” p, per contro i modelli di tipo MA rappresentano un<br />
tentativo di spiegare il presente come risultante da una successione incontrollata di<br />
impulsi casuali, statisticamente riassunti nel white noise A t .<br />
In un processo AR( p ) non sono imposte condizioni per i parametri in modo da<br />
assicurare l‟invertibilità, mentre si richiedono per la stazionarietà.<br />
In un processo MAq non sono imposte condizioni sui parametri per quanto riguarda la<br />
stazionarietà, mentre le si impongono per l‟invertibilità.<br />
Per ogni processo AR( p ) stazionario esiste una rappresentazione unica del tipo<br />
MA , e per ogni processo MAq invertibile ne esiste una del tipo AR .<br />
Nei processi MAq teorici il correlogramma si annulla bruscamente per h q,<br />
il<br />
correlogramma parziale invece decresce lentamente con andamento dipendente dal<br />
segno dei parametri j .<br />
Nei processi AR( p ) teorici il correlogramma parziale si annulla bruscamente per h q<br />
mentre il correlogramma decresce lentamente con andamento dipendente dal segno dei<br />
parametri j .<br />
All‟atto pratico si considerano come nulle, al fine dell‟identificazione del modello a<br />
partire dai dati, quelle autocorrelazioni che restino comprese fra le due bande tratteggiate<br />
nei correlogrammi, con un livello di confidenza del 95%.<br />
I Modelli Autoregressivi a Media Mobile<br />
Un modello del tipo autoregressivo a media mobile di ordini p e q, indicato con<br />
ARMA( p, q ) , è un costrutto statistico che comprende sia termini autoregressivi che a media<br />
mobile e può essere espresso come segue:<br />
Y c Y Y ... Y A A A ... A<br />
t 1 t1 2 t2 p t p t 1 t1 2 t2 q tq Per comodità di rappresentazione introduciamo ora l‟operatore retrocessore o backward B<br />
secondo la seguente definizione:<br />
0<br />
B X t Yt<br />
BX Y<br />
t t1<br />
2<br />
B X t Yt2<br />
...<br />
k<br />
B X t Yt<br />
k<br />
Trattandosi di un operatore lineare vale la seguente: <br />
0 1B Xt 0X t 1X t1<br />
.<br />
Se consideriamo il processo MA( q ) Y t con media supposta nulla possiamo scriverlo<br />
sfruttando l‟operatore B come
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Y A A A ... <br />
A<br />
t t 1 t1 2 t2 q tq Y A BA B A ... <br />
B A<br />
2<br />
q<br />
t t 1 t 2 t q t<br />
Y<br />
<br />
B<br />
<br />
A<br />
<br />
Y B A<br />
q<br />
t 1j j1<br />
j<br />
t<br />
t t<br />
mentre un processo AR( p ) Y t con termine c pari a zero può essere rappresentato come<br />
Y Y Y ... Y A<br />
t 1 t1 2 t2 p t p t<br />
Y BY B Y ... B Y A<br />
2<br />
p<br />
t 1 t 2 t p t t<br />
<br />
p<br />
j<br />
1jBYt At<br />
j1<br />
<br />
<br />
B Y A<br />
t t<br />
Notiamo anche in questa sede la dualità già discussa in precedenza: le funzioni B e<br />
B sono dei filtri lineari che, in questa formulazione, nel caso dei modelli AR( p ) filtrano<br />
l‟informazione passata e restituiscono “l‟innovazione” sotto forma di un rumore bianco, nel<br />
caso dei modelli MA( q ) filtrano i disturbi passati e restituiscono l‟informazione al tempo<br />
presente. L‟utilità di questa rappresentazione risulta evidente qualora ci interessasse ricavare i<br />
parametri del modello di ordine infinito di tipo AR associato al MA di ordine finito (qualora<br />
sia rispettata l‟invertibilità) o viceversa; si noti infatti che le relazioni definite prima permettono<br />
di scrivere:<br />
B Yt<br />
At<br />
B B At At<br />
BB1 B 1BB1B <br />
<br />
<br />
<br />
Seguendo la notazione appena introdotta potremo quindi esprimere il processo di tipo<br />
ARMA( p, q ) come segue:<br />
Y Y Y ... Y c A A A ... <br />
A<br />
t 1 t1 2 t2 p t p t 1 t1 2 t2 q tq <br />
1 <br />
<br />
<br />
<br />
<br />
<br />
1 <br />
<br />
<br />
<br />
B Y c B A<br />
p q<br />
j<br />
jBYtc j<br />
jBAt<br />
j1 j1<br />
<br />
t t<br />
I modelli ARMA dunque altro non sono che combinazioni dei modelli autoregressivo e a<br />
media mobile. L‟importanza pratica del modello misto risiede nel fatto che per molte serie
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
temporali esso richiede un numero di parametri inferiore a quelli necessari per un modello<br />
autoregressivo puro.<br />
ARMA p, q sia stazionario è legata alle radici<br />
La condizione affinché un processo <br />
dell‟equazione caratteristica della parte autoregressiva del modello, che si ottiene uguagliando a<br />
B . Si tratta esattamente delle stesse condizioni imposte per il modello<br />
zero l‟operatore <br />
AR p e già discusse in precedenza, e rileggendole alla luce della nuova formulazione<br />
richiedono che le radici B , j 1,..., p dell‟operatore siano tutte in modulo superiori ad 1 (nel<br />
j<br />
caso AR 2 questa condizione si riflette sui parametri in modo da costringerli all‟interno del<br />
triangolo di cui in precedenza). In questo caso per il processo esiste anche una rappresentazione<br />
del tipo MA .<br />
Analogamente la condizione per l‟invertibilità coincide con quella già presentata relativa al<br />
modello MAq , ovvero è legata alle radici dell‟equazione caratteristica della parte a media<br />
mobile, che si ottiene uguagliando a zero l‟operatore B . Le radici B , j 1,..., q dovranno<br />
essere tutte in modulo superiori ad 1. In questo caso per il processo esiste anche una<br />
rappresentazione del tipo AR .<br />
In sostanza: se il processo ARMA p, q è stazionario ed invertibile lo si può approssimare,<br />
trascurando un certo numero di termini, in un processo AR p o in un MAq .<br />
Risulta inoltre chiaramente che i processi autoregressivo di ordine p e a media mobile di<br />
ARMA p, q , infatti:<br />
ordine q sono casi particolari del più generale <br />
p 0 ARMA p, q MAq <br />
q 0 ARMA p, q AR p<br />
Il valore atteso del processo risulta essere:<br />
t 1 t1ptp E Y c E Y ... E Y 0 0 ... 0<br />
c<br />
EY t <br />
1 ... <br />
1 2<br />
La funzione di autocovarianza è fornita dalle seguenti due relazioni:<br />
dove <br />
<br />
h 1 h1 ... p h p h 1 h1 ... q hq hq <br />
h 1 h1 2 h2 ... p h p<br />
hq <br />
h E Yt E Yt At E At<br />
<br />
è la covarianza incrociata tra le variabili t Y e A t .<br />
La varianza ha quindi, per le note proprietà di simmetria della covarianza, la seguente<br />
espressione:<br />
... ... <br />
<br />
2 <br />
0 1 1 p p 1 1<br />
q p<br />
p<br />
j
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
si noti che è possibile calcolare la varianza soltanto se sono note 1 ,..., p , che si trovano<br />
risolvendo la funzione di autocovarianza espressa nel sistema precedente.<br />
L‟autocorrelazione risulta immediatamente dalla seconda equazione del sistema e vale<br />
<br />
h 1 h1 2 h2 ... p h p h q<br />
La funzione di autocorrelazione può avere andamenti molto diversi, la regola generale è che<br />
i primi q coefficienti sono sostanzialmente arbitrari, dopo di che la ACF converge verso lo zero<br />
come fa, a partire da zero, la funzione di autocorrelazione di un AR p . Dunque la ACF è<br />
composta da un numero infinito di termini, e così anche la funzione di autocorrelazione parziale,<br />
che si comporta nello stesso modo ma invertendo i termini (a q si sostituisce p e ad AR p <br />
MA( q ) . Di seguito i grafici teorici delle funzioni di autocorrelazione e autocorrelazione parziale<br />
per alcuni processi di tipo ARMA p, q .
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
E‟ importante notare che, a parte per la „regola generale‟ di prima, non arrestandosi ad un<br />
certo lag queste funzioni non ci forniscono indicazioni sull‟ordine di un eventuale modello<br />
autoregressivo a media mobile da applicare ai dati.<br />
Vediamo ora il caso più semplice ed impiegato di modello misto, l‟ ARMA 1,1 , che è<br />
esprimibile nella forma<br />
Y c YA A<br />
t 1 t1t1t1 La condizione di stazionarietà di un processo ARMA p, q coincide con quella di un<br />
modello del tipo <br />
1.<br />
AR p , dunque il processo è stazionario a condizione che 1
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
La condizione di invertibilità è la stessa di un processo MAq , dunque nel nostro caso sarà<br />
verificata qualora 1 1.<br />
Il valor medio risulta essere EY <br />
t<br />
c<br />
, mentre la funzione di autocovarianza vale<br />
1<br />
1<br />
12 <br />
0 <br />
2<br />
1 0 <br />
2<br />
<br />
2<br />
1<br />
2<br />
2 1 1<br />
2<br />
0 <br />
2<br />
1<br />
2<br />
1<br />
1<br />
1 1 2<br />
2<br />
1 1 0 1<br />
h 1 h1<br />
h1<br />
1 1<br />
L‟autocorrelazione segue immediatamente rapportando h a 0 . In generale (per h 2 )<br />
varrà che h 1h1. In condizioni di stazionarietà questa funzione decresce verso lo zero al<br />
crescere del lag h secondo un andamento smorzato di tipo esponenziale con segni dipendenti dal<br />
segno di 1.<br />
Di seguito si riportano i grafici di quattro simulazioni di processi ARMA 1,1 al variare dei<br />
parametri 1<br />
e 1<br />
. Si mostra anche cosa succede qualora la condizione di stazionarietà non sia<br />
rispettata.
<strong>Serie</strong> <strong>Storiche</strong> e <strong>Processi</strong> <strong>Stocastici</strong> – Federico Andreis<br />
Se invece non è rispettata la condizione di stazionarietà 1 1 il software si rifiuta di<br />
rappresentare i modelli facendo notare che non sono stazionari, ma per farci un‟idea possiamo<br />
imporre un valore di 1 molto prossimo ad 1, diciamo 0.999: