Identificazione dei Modelli e Analisi dei Dati 27/3/1998
Identificazione dei Modelli e Analisi dei Dati 27/3/1998
Identificazione dei Modelli e Analisi dei Dati 27/3/1998

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
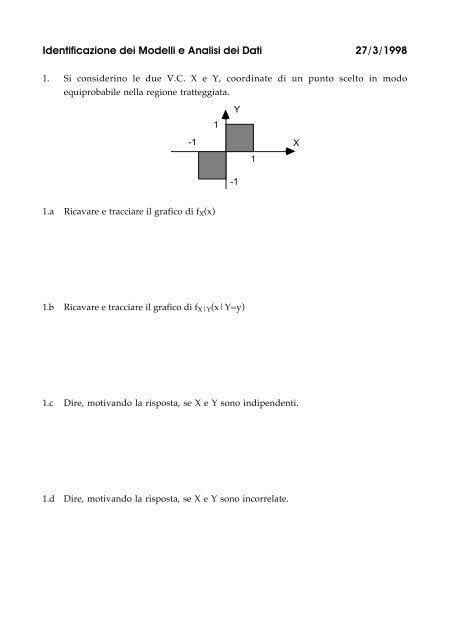
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> <strong>27</strong>/3/<strong>1998</strong>1. Si considerino le due V.C. X e Y, coordinate di un punto scelto in modoequiprobabile nella regione tratteggiata.1Y-11X-11.a Ricavare e tracciare il grafico di f X (x)1.b Ricavare e tracciare il grafico di f X|Y (x|Y=y)1.c Dire, motivando la risposta, se X e Y sono indipendenti.1.d Dire, motivando la risposta, se X e Y sono incorrelate.
2. Si supponga che l'arrivo <strong>dei</strong> clienti allo sportello di una banca sia modellizzabiletramite degli eventi di Poisson con frequenza media λ = 1 cliente/minuto. Dueimpiegati (di seguito indicati con A e B) fanno la seguente scommessa: se ilprossimo cliente arriva dopo più di 1 minuto, A paga s dollari a B. Viceversa, se ilprossimo cliente arriva dopo T minuti, con T ≤ 1, B paga T dollari ad A (nota: T èun numero reale). Si indichi con V la V.C. vincita di A (che può assumere valorinegativi). Per comodità, si definiscano anche i due eventi A e B:A: l'impiegato A vince la scommessa (T ≤ 1 ⇒ V = T dollari)B: l'impiegato B vince la scommessa (T > 1 ⇒ V = -s).2.a Calcolare P(A) e P(B).2.b Calcolare e tracciare il grafico di f V|B (v|B) (la ddp della vincita V sotto l'ipotesiche T > 1).2.c Calcolare e tracciare il grafico di f V|A (v|A) (la ddp della vincita V sotto l'ipotesiche T ≤ 1). (Attenzione: se si verifica A, risulta 0 ≤ V ≤ 1)
2.d Calcolare e tracciare il grafico di f V (v).3. Si considerino due V.C congiunte X e Y con E[X] = E[Y] = 0, Var[X] = Var[Y] = 1,Cov[X,Y] = 0.5. Dato un numero reale, si definisca Z = X+aY. Determinare a inmodo tale che Cov[X,Z] = 0.
4. Dire se le seguenti affermazioni sono vere o false:(Punteggio: risposta esatta = 1, errore = -1, non risponde = 0)• <strong>Dati</strong> due eventi A,B tra di loro indipendenti, risulta sempreP(A+B) = P(A)+P(B).V❑F❑• <strong>Dati</strong> due eventi A,B con P(B) ≠ 0, risulta sempre P(A) = P(A|B)P(B).❑❑• La probabilità di avere almeno un successo su n prove di Bernoulli èpari a 1-(1-p) n .• Siano X,Y due V.C. indipendenti. Allora,Var[X+Y-E[X]-E[Y]] = σ X 2 +σ Y 2 .• Date due V.C. congiunte X,Y risulta Var[X+Y] = Var[X]+Var[Y] se esolo se X e Y sono incorrelate.• Data una V.C. X ed un numero reale a>0, si definisca Y = X/a. Allora,f Y (y) = f X (y/a)/a.• Date due V.C. congiunte X,Y, si supponga che la densitàcondizionata f Y|X (y|X=x) sia ben definita. Alloraf X (x) = ∫f Y|X (y|X=x)f Y (y)dy-∞+∞• Date due V.C. X, Y tra di loro indipendenti, si consideri una genericafunzione di V.C. Z = g(X,Y). Allora, E[Z]=g(E[X],E[Y]).• Siano X k , k = 1,…,N, delle V.C. i.i.d. con E[X k ] = m < +∞; allora, laloro media campionaria, per N → ∞, converge in probabilità ad m.❑❑❑❑❑❑❑❑❑❑❑❑❑❑• Siano X e Y due V.C. congiunte tra di loro incorrelate. Allora,f XY (x,y) = f X (x)f Y (y).❑❑
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 30/6/<strong>1998</strong>1. Dire se le seguenti affermazioni sono vere o false:(Punteggio: risposta esatta = 1, errore = -1, non risponde = 0)• Dato un P.C. stazionario x(·), risulta sempre γ xx (2k) ≥ 0, k = 0,1,…,.• Sia (G(z),σ 2 ) un fattore spettrale non canonico di un P.C. stazionario.Allora, la varianza dell'errore di predizione ad un passo è sempremaggiore di σ 2 .• Se il fattore spettrale canonico Ĝ(z) di un P.C. gaussiano a spettrorazionale non ha zeri con modulo unitario, il predittore ottimo a kpassi è stabile.• Un segnale persistentemente eccitante di ordine m lo è anche diordine m-1.• Sia y(t) = Zsin(t), dove Z ~ G(0,1). Allora y(·) è un P.C. stazionario.• Sia Y(z) = H(z)X(z) dove H(z) è stabile e x(·) è un P.C. stazionario(scalare). Se H(z)H(z -1 ) = Φ xx (z) -1 , allora y(·) è un rumore bianco.• Sia x(·) un P.C. stazionario con E[x(t)] = 0. Allora, per |τ| < N,N-|τ|γˆxx (τ) = 1 N ∑x(i)x(i+τ)i=1è uno stimatore polarizzato della γ xx (τ).• Sia y(t) = x(t)+w(t), dove w(·) è un rumore bianco e x(·) è un P.C.stazionario, indipendente da w(·), con fattore spettrale canonico Ĝ(z).Allora, i poli del fattore spettrale canonico di y(·) appartengonoall'insieme <strong>dei</strong> poli di Ĝ(z).• Per un AR(1), risulta ŷ(t+2|t) = 0.• Sia y(·) un P.C. stazionario ottenuto come l'uscita di un ARalimentato da un rumore bianco w(·) con E[w(t)] = m w ≠ 0. Allora,risulta sempre E[y(t)] ≥ m w .V❑❑❑❑❑❑❑❑❑❑F❑❑❑❑❑❑❑❑❑❑
2. Si scriva sopra il grafico degli spettri il numero del corrispondente fattorespettrale (in tutti e quattro i casi σ 2 = 1)1. G(z) = 1 + 0.5z -1 2. G(z) = 1 - 0.5z -13. G(z) = 1 + 0.9z -1 4. G(z) = 1 - 0.9z -14433spettro2spettro21100 2 4w00 2 4w2.52.522spettro1.51spettro1.510.50.500 2 4w00 2 4w
3. Scrivere sopra ciascuna realizzazione di P.C. stazionario il numero che identificail corrispondente grafico dell'autocovarianza12n.115n.21010gamma(t)86gamma(t)504-52-50 0 50tn.310.8-10-50 0 50tn.464gamma(t)0.60.4gamma(t)200.2-20-50 0 50t-4-50 0 50t10542y0y0-5-2-100 50 100t10-40 50 100t550y0y-5-5-100 50 100t-100 50 100t
4. Si consideri il seguente processo casualey(t) = 0.6y(t-1) + 2v(t) + v(t-1) ,v(·) ~ WGN(0,1)4.a Ricavare l'espressione nel dominio del tempo del predittore ottimo a due passi.4.b Calcolare la varianza dell'errore di predizione a due passi.
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 21/7/<strong>1998</strong>1. Si considerino due V.C congiunte X,Y distribuite in modo uniforme nel triangoloin figuraY1X1.a Calcolare la funzione di distribuzione della V.C. Z = Y/X.1.b Calcolare la ddp di Z.12. Sia X una V.C. discreta. Dimostrare che Var[X] = 0 implica P(X=E[X])=1.3.a Si dia la definizione di segnale persistentemente eccitante (p.e.) di ordine n.3.b Dimostrare che un rumore bianco è p.e. di ogni ordine (con probabilità uno).4. Si consideri il seguente schema blocchi in cui G(z) = 1+0.5z -1 , H(z) = z -1 +0.1z -2WN(0,1)H(z)WN(0,1)G(z)++y4.a Supponendo che i due rumori bianchi siano indipendenti tra loro, calcolare lavarianza del P.C. stazionario y(·).4.b Ricavare lo spettro e la funzione di autocovarianza di y(·).
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 15/9/<strong>1998</strong>1. Un automobilista viola quotidianamente un divieto di svolta al fine di accorciarel'itinerario di ritorno a casa dal lavoro. Infatti, ritiene che sia molto bassa laprobabilità p di essere multato da un vigile quando si commette tale infrazione.Si indichi con x k la probabilità di farla franca k giorni di seguito. Suppponendop = 0.001, calcolare per quali valori di k risulta x k = 0.5 e x k = 0.05.2. Si supponga di avere a disposizione su un computer un generatore di numericasuali che produce realizzazioni di una V.C. U uniforme in [0,1]. Dire,motivando la risposta, quali operazioni bisogna effettuare per ottenererealizzazioni di una V.C. esponenziale con parametro λ.3. Si esponga sinteticamente (max. 1 pagina) il metodo della stima dello spettro diun P.C. stazionario basato sul periodogramma.4. Si consideri il seguente schema blocchi in cui y(·) è un P.C. stazionario eG(z) = 1/(1+az -1 ) è la fdt di un AR(1).WN(0,1)WN(0, σ 2 )G(z)++ySapendo che Var[y(t)] = 11/3 e che Γ yy (0) = 5, determinare i valori di a e σ 2 .
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 29/9/<strong>1998</strong>1. Si considerino due V.C congiunte X,Y distribuite in modo uniforme nella zonaindicata in grigio nella figura:Y1-1X11.a Calcolare la funzione di distribuzione della V.C. Z = X+Y.1.b Calcolare la ddp di Z.-12.a Dare la definizione di eventi di Poisson.2.b Dire come è distribuito il tempo di attesa tra un evento di Poisson e il successivo.(Non è richiesto di ricavare la distribuzione).2.b Relativamente agli eventi di Poisson, spiegare cosa si intende per proprietà di"non memoria"3. Spiegare concisamente (1 pagina al massimo) cosa si intende per metodi diidentificazione a minimizzazione dell'errore di predizione.4. Si consideri un P.C. stazionario y(·) che soddisfa l'equazioney(t) = 0.5y(t-1) + w(t-1) - 2w(t-2),w(·) ~ WN(0,1)4.a Ricavare il predittore ottimo ad un passo4.b Determinare la varianza dell'errore di predizione a due passi.
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 2/11/<strong>1998</strong>1. Dato un numero reale α ed una V.C X, dimostrare cheE[(X-α) 2 ] = (E[X]-α) 2 +Var[X].2. Le località A e B siano collegate da due diversi percorsi come indicato in figura.CADB2.a Se si segue il percorso A-C-B, vi è una probabilità pari a 0.1 di trovare un ingorgostradale, nel qual caso si impiegano più di due ore per raggiungere B. Se non vi èingorgo i tempi di percorrenza <strong>dei</strong> tratti A-C e C-B sono V.C. indipendentientrambe distribuite uniformemente nell'intervallo 30'-60'. Calcolare laprobabilità di percorrere la strada A-C-B in meno di 90'.2.a Se si segue il percorso A-D-B, vi è una probabilità pari a 0.2 di trovare un ingorgostradale, nel qual caso si impiegano più di due ore per raggiungere B. Se non vi èingorgo i tempi di percorrenza <strong>dei</strong> tratti A-D e D-B sono V.C. indipendentidistribuite uniformemente in 30'-60' e 30'-40', rispettivamente. Calcolare laprobabilità di percorrere la strada A-D-B in meno di 90'.3.a Dare la definizione di segnale persistentemente eccitante di ordine n.3.b Fornire un esempio di segnale che è persistentemente eccitante di ordine 1 manon di ordine 2.4. Si considerino i processi casualix(t) = 0.7x(t-1) + w(t) ,y(t) = x(t) + v(t) ,w(·) ~ WN(0,1)v(·) ~ WN(0,1).con v(·) e w(·) indipendenti tra loro.4.a Calcolare γ yy (0) e γ yy (1).4.b Si definisca s(t) = ay(t-1). Trovare il valore di a che minimizza E[(y(t)-s(t)) 2 ].
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 8/2/19991. Si consideri una sequenza di V.C. X k indipendenti e identicamente distribuite.1.a Si enunci la Legge <strong>dei</strong> Grandi Numeri fornendo una condizione sufficienteaffinché essa valga.1.b Si enunci il Teorema Centrale del Limite fornendo una condizione sufficienteaffinché esso valga.2. Si considerino due V.C. X e Y tra di loro indipendenti distribuite in modouniforme tra -1 e +1. Determinare la d.d.p. della V.C. Z = X - Y3 Si consideri il problema della stima di un modello lineare nei parametri e sisupponga di doverne scegliere la complessità all'interno di classi di modelligerarchici (esempio: costante, retta, parabola, cubica, etc.). In altre parole, si trattadi decidere se i dati sono descritti "meglio" da una retta piuttosto che da unacostante o da una cubica, etc. Si discuta in non più di una pagina e mezza comepuò essere affrontato il problema.4 I pazienti affetti da diabete mellito insulino-dipendente misurano la loroglicemia tipicamente 3 volte al giorno. Indicando con y k la k-esima misura diglicemia e con v k il relativo errore di misura, l'andamento della serie delleglicemie può essere schematizzato come la somma di un trend lineare e di unacomponente ciclica (giornaliera):y k = θ 1 + θ 2 k + θ 3 sin(2πk/3) + θ 4 cos(2πk/3) + v kIpotizzando che gli errori di misura siano i.i.d. e gaussiani, si descriva, in non piùdi una pagina e mezza, una procedura per la stima <strong>dei</strong> parametri del modello e<strong>dei</strong> loro intervalli di confidenza basata sul metodo della massimaverosimiglianza.5. Supponendo di avere a disposizione due serie temporali u k (ingressi) e y k (uscite),si descriva, in non più di una pagina, cosa è un modello ARX e come se nepossono stimare i parametri.6. Si consideri il seguente schema blocchi in cui G(z) = 1+0.5z -1 , H(z) = z -1 +0.6z -2WN(0,1)H(z)WN(0,1)G(z)++y6.a Supponendo che i due rumori bianchi siano indipendenti tra loro, calcolarespettro e autocovarianza del P.C. stazionario y(·).6.b Ricavare il predittore e due passi y(t+2|t) e la varianza del relativo errore dipredizione.
<strong>Identificazione</strong> <strong>dei</strong> <strong>Modelli</strong> e <strong>Analisi</strong> <strong>dei</strong> <strong>Dati</strong> 1/3/19991.a Dare la definizione di probabilità condizionata1.b Enunciare e dimostrare il teorema della probabilità totale.1.c Enunciare e dimosrare il teorema di Bayes.2. Siano X e Y due V.C. che rappresentano le coordinate di un punto scelto in modoequiprobabile nel quadrato disegnato in figura.1Y2.a Calcolare la ddp della V.C. V = max(X,Y).2.b Calcolare la ddp della V.C. W = min(X,Y).2.c Dire, motivando la risposta, se V e W sono indipendenti.13 Si consideri il problema della stima di un modello lineare nei parametri e sisupponga di doverne scegliere la complessità all'interno di classi di modelligerarchici (esempio: costante, retta, parabola, cubica, etc.). In altre parole, si trattadi decidere se i dati sono descritti "meglio" da una retta piuttosto che da unacostante o da una cubica, etc. Si discuta in non più di una pagina e mezza comepuò essere affrontato il problema.4. Si supponga di misurare la grandezza θ 1 mediante tre sensori. I primi dueforniscono delle misure non polarizzate affette da errori di misura v 1 , v 2 :XY 1 = θ 1 + v 1Y 2 = θ 1 + v 2v 1 ~ G(0,1)v 2 ~ G(0,1)Il terzo sensore invece è starato e fornisce una misura polarizzata, conpolarizzazione pari a θ 2 , ed è affetto da un errore di misura v 3 :Y 3 = θ 1 + θ 2 + v 3v 3 ~ G(0,4)Supponendo che gli errori di misura siano tutti indipendenti tra loro, ricavarel'espressione della stima ML di θ 1 e θ 2 in funzione di Y 1 , Y 2 , Y 3 (è sufficientericavare la formula risolutiva senza calcolare l'inversione di matrice).5. Descrivere il test di bianchezza <strong>dei</strong> "cambi di segno".6. Sia y(·) un P.C. stazionario tale cheE[y(t)] = 1 , γ yy (t) = 0.5τ0.75Trovare il fattore spettrale canonico ed il predittore a k passi.