Fjernstyring av Legorobot - NTNU
Fjernstyring av Legorobot - NTNU
Fjernstyring av Legorobot - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2 Utgangspunkt<br />
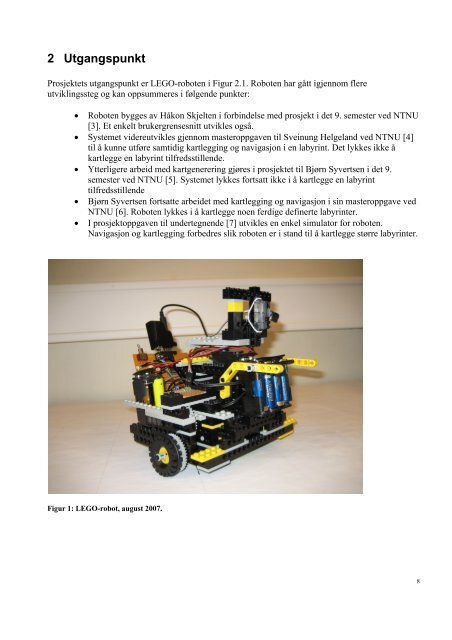
Prosjektets utgangspunkt er LEGO-roboten i Figur 2.1. Roboten har gått igjennom flere<br />
utviklingssteg og kan oppsummeres i følgende punkter:<br />
• Roboten bygges <strong>av</strong> Håkon Skjelten i forbindelse med prosjekt i det 9. semester ved <strong>NTNU</strong><br />
[3]. Et enkelt brukergrensesnitt utvikles også.<br />
• Systemet videreutvikles gjennom masteroppg<strong>av</strong>en til Sveinung Helgeland ved <strong>NTNU</strong> [4]<br />
til å kunne utføre samtidig kartlegging og n<strong>av</strong>igasjon i en labyrint. Det lykkes ikke å<br />
kartlegge en labyrint tilfredsstillende.<br />
• Ytterligere arbeid med kartgenerering gjøres i prosjektet til Bjørn Syvertsen i det 9.<br />
semester ved <strong>NTNU</strong> [5]. Systemet lykkes fortsatt ikke i å kartlegge en labyrint<br />
tilfredsstillende<br />
• Bjørn Syvertsen fortsatte arbeidet med kartlegging og n<strong>av</strong>igasjon i sin masteroppg<strong>av</strong>e ved<br />
<strong>NTNU</strong> [6]. Roboten lykkes i å kartlegge noen ferdige definerte labyrinter.<br />
• I prosjektoppg<strong>av</strong>en til undertegnende [7] utvikles en enkel simulator for roboten.<br />
N<strong>av</strong>igasjon og kartlegging forbedres slik roboten er i stand til å kartlegge større labyrinter.<br />
Figur 1: LEGO-robot, august 2007.<br />
8