Fjernstyring av Legorobot - NTNU
Fjernstyring av Legorobot - NTNU
Fjernstyring av Legorobot - NTNU

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
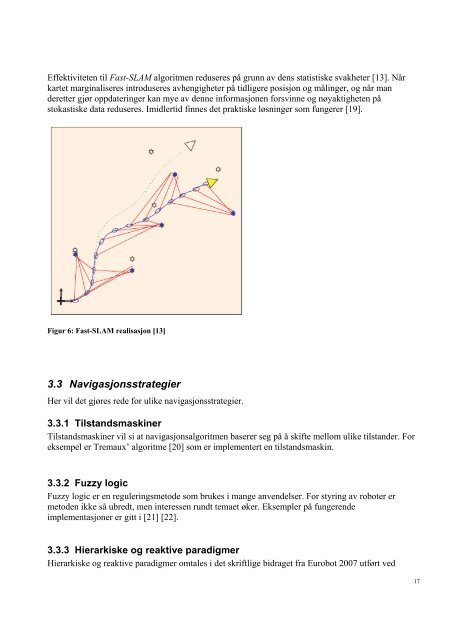
Effektiviteten til Fast-SLAM algoritmen reduseres på grunn <strong>av</strong> dens statistiske svakheter [13]. Når<br />
kartet marginaliseres introduseres <strong>av</strong>hengigheter på tidligere posisjon og målinger, og når man<br />
deretter gjør oppdateringer kan mye <strong>av</strong> denne informasjonen forsvinne og nøyaktigheten på<br />
stokastiske data reduseres. Imidlertid finnes det praktiske løsninger som fungerer [19].<br />
Figur 6: Fast-SLAM realisasjon [13]<br />
3.3 N<strong>av</strong>igasjonsstrategier<br />
Her vil det gjøres rede for ulike n<strong>av</strong>igasjonsstrategier.<br />
3.3.1 Tilstandsmaskiner<br />
Tilstandsmaskiner vil si at n<strong>av</strong>igasjonsalgoritmen baserer seg på å skifte mellom ulike tilstander. For<br />
eksempel er Tremaux’ algoritme [20] som er implementert en tilstandsmaskin.<br />
3.3.2 Fuzzy logic<br />
Fuzzy logic er en reguleringsmetode som brukes i mange anvendelser. For styring <strong>av</strong> roboter er<br />
metoden ikke så ubredt, men interessen rundt temaet øker. Eksempler på fungerende<br />
implementasjoner er gitt i [21] [22].<br />
3.3.3 Hierarkiske og reaktive paradigmer<br />
Hierarkiske og reaktive paradigmer omtales i det skriftlige bidraget fra Eurobot 2007 utført ved<br />
17