
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ω = velocidade angular da máquina<br />
I = corrente da armadura<br />
T = torque<br />
Através das equações acima, podemos<br />
concluir que a velocidade de rotação é inversamente<br />
proporcional ao fluxo magnético:<br />
porém, é diretamente proporcional à<br />
tensão de armadura. Isto significa que, para<br />
controlar a velocidade de rotação de um<br />
motor CC, basicamente, podemos atuar em<br />
duas variáveis: tensão da armadura (ddp nas<br />
escovas do motor), e corrente da bobina por<br />
excitação do campo magnético (estator).<br />
Quanto maior Eg, maior será ω, e<br />
quanto maior a corrente de magnetização,<br />
menor ω, uma vez que o fluxo magnético<br />
no entreferro diminui.<br />
A melhor alternativa para controle, entretanto,<br />
é manter o fluxo constante, e o maior<br />
possível, uma vez que sua diminuição acarreta<br />
um decréscimo de torque (T = K . Ø . i).<br />
A figura 2 ilustra uma curva de controle<br />
pela armadura e pelo campo.<br />
O controle da velocidade pelo fluxo de<br />
entreferro é utilizado em acionamentos independentes,<br />
mas quando se quer velocidade<br />
acima da velocidade nominal da máquina.<br />
Tipicamente, opera-se com campo pleno (para<br />
maximizar o torque) e, ao ser atingida a velocidade<br />
nominal, inicia-se o enfraquecimento<br />
do campo (para se ter maior velocidade), às<br />
custas, é claro, de uma redução de torque.<br />
Quadrantes de Operação<br />
Considerando o fluxo magnético constante,<br />
basicamente, pode-se dizer que “o<br />
torque está para a corrente de armadura (Ia),<br />
assim como a velocidade para a tensão (Eg).”<br />
Conforme podemos observar na figura 3,<br />
há quatro modos possíveis de um conversor<br />
CC atuar. Na verdade, esses “modos” são<br />
chamados de quadrantes.<br />
a) Quadrante I<br />
No quadrante I temos torque e velocidade<br />
positivos, o que significa que a máquina<br />
está se comportando como motor e girando<br />
em um sentido concordante como uma<br />
referência (figura 4).<br />
b) Quadrante III<br />
Analogamente à operação em I, no quadrante<br />
III tanto o torque como a velocidade<br />
são negativos. Isso quer dizer que o sistema<br />
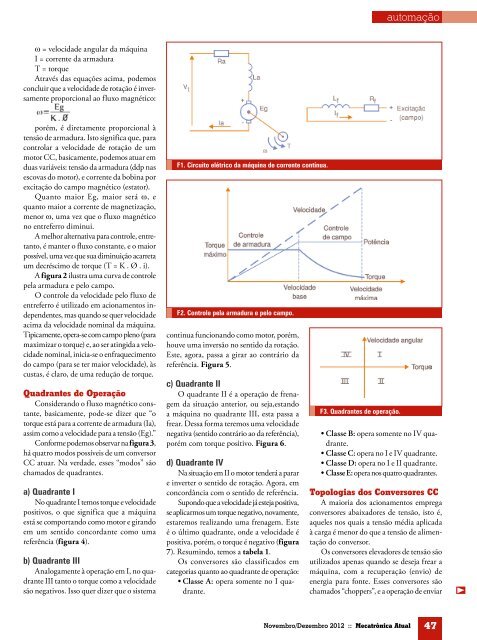
F1. Circuito elétrico da máquina de corrente contínua.<br />
F2. Controle pela armadura e pelo campo.<br />
continua funcionando como motor, porém,<br />
houve uma inversão no sentido da rotação.<br />
Este, agora, passa a girar ao contrário da<br />
referência. Figura 5.<br />
c) Quadrante II<br />
O quadrante II é a operação de frenagem<br />
da situação anterior, ou seja,estando<br />
a máquina no quadrante III, esta passa a<br />
frear. Dessa forma teremos uma velocidade<br />
negativa (sentido contrário ao da referência),<br />
porém com torque positivo. Figura 6.<br />
d) Quadrante IV<br />
Na situação em II o motor tenderá a parar<br />
e inverter o sentido de rotação. Agora, em<br />
concordância com o sentido de referência.<br />
Supondo que a velocidade já esteja positiva,<br />
se aplicarmos um torque negativo, novamente,<br />
estaremos realizando uma frenagem. Este<br />
é o último quadrante, onde a velocidade é<br />
positiva, porém, o torque é negativo (figura<br />
7). Resumindo, temos a tabela 1.<br />
Os conversores são classificados em<br />
categorias quanto ao quadrante de operação:<br />
• Classe A: opera somente no I quadrante.<br />
F3. Quadrantes de operação.<br />
Novembro/Dezembro 2012 :: <strong>Mecatrônica</strong> <strong>Atual</strong><br />
automação<br />
• Classe B: opera somente no IV quadrante.<br />
• Classe C: opera no I e IV quadrante.<br />
• Classe D: opera no I e II quadrante.<br />
• Classe E: opera nos quatro quadrantes.<br />
Topologias dos Conversores CC<br />
A maioria dos acionamentos emprega<br />
conversores abaixadores de tensão, isto é,<br />
aqueles nos quais a tensão média aplicada<br />
à carga é menor do que a tensão de alimentação<br />
do conversor.<br />
Os conversores elevadores de tensão são<br />
utilizados apenas quando se deseja frear a<br />
máquina, com a recuperação (envio) de<br />
energia para fonte. Esses conversores são<br />
chamados “choppers”, e a operação de enviar<br />
47