Lectii curs IRA SA rezumat 1.pdf - Catedra de Automatica Craiova
Lectii curs IRA SA rezumat 1.pdf - Catedra de Automatica Craiova
Lectii curs IRA SA rezumat 1.pdf - Catedra de Automatica Craiova
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
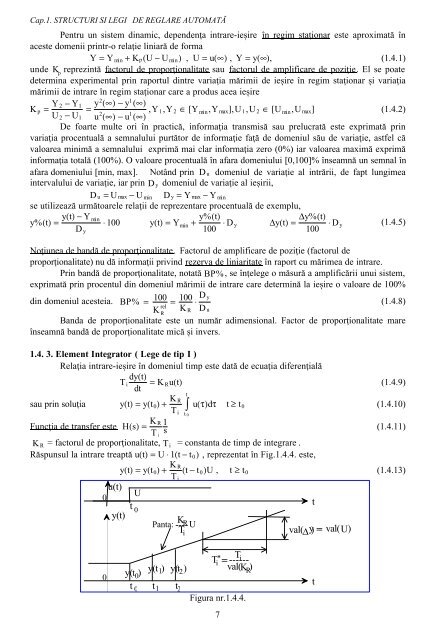
Cap.1. STRUCTURI SI LEGI DE REGLARE AUTOMATÁPentru un sistem dinamic, <strong>de</strong>pen<strong>de</strong>nþa intrare-ießire ín regim staþionar este aproximatá ínaceste domenii printr-o relaþie liniará <strong>de</strong> formaY = Y min + Kp(U − U min ) , U = u(∞) , Y = y(∞),(1.4.1)un<strong>de</strong> K preprezintá factorul <strong>de</strong> proporþionalitate sau factorul <strong>de</strong> amplificare <strong>de</strong> poziþie. El se poate<strong>de</strong>termina experimental prin raportul dintre variaþia márimii <strong>de</strong> ießire ín regim staþionar ßi variaþiamárimii <strong>de</strong> intrare ín regim staþionar care a produs acea ießireK p = Y 2 − Y 1(1.4.2)U 2 − U 1De foarte multe ori ín practicá, informaþia transmisá sau prelucratá este exprimatá prinvariaþia procentualá a semnalului purtátor <strong>de</strong> informaþie faþá <strong>de</strong> domeniul sáu <strong>de</strong> variaþie, astfel cávaloarea minimá a semnalului exprimá mai clar informaþia zero (0%) iar valoarea maximá exprimáinformaþia totalá (100%). O valoare procentualá ín afara domeniului [0,100]% ínseamná un semnal ín= y2 (∞) − y 1 (∞)u 2 (∞) − u 1 (∞) ,Y 1,Y 2 ∈ [Y min ,Y max ],U 1 ,U 2 ∈ [U min ,U max ]afara domeniului [min, max]. Notänd prin Du domeniul <strong>de</strong> variaþie al intrárii, <strong>de</strong> fapt lungimeaintervalului <strong>de</strong> variaþie, iar prin domeniul <strong>de</strong> variaþie al ießirii,DyDu = Umax − U min Dy = Ymax − Y minse utilizeazá urmátoarele relaþii <strong>de</strong> reprezentare procentualá <strong>de</strong> exemplu,y%(t) = y(t) − Y min⋅ 100 y(t) = YD min + y%(t)y 100 ⋅ D y ∆y(t) = ∆y%(t) ⋅ D y100(1.4.5)Noþiunea <strong>de</strong> bandá <strong>de</strong> proporþionalitate. Factorul <strong>de</strong> amplificare <strong>de</strong> poziþie (factorul <strong>de</strong>proporþionalitate) nu dá informaþii privind rezerva <strong>de</strong> liniaritate ín raport cu márimea <strong>de</strong> intrare.Prin bandá <strong>de</strong> proporþionalitate, notatá BP% , se ínþelege o másurá a amplificárii unui sistem,exprimatá prin procentul din domeniul márimii <strong>de</strong> intrare care <strong>de</strong>terminá la ießire o valoare <strong>de</strong> 100%din domeniul acesteia. BP% = 100 = 100 ⋅ D y(1.4.8)relK RK R DuBanda <strong>de</strong> proporþionalitate este un numár adimensional. Factor <strong>de</strong> proporþionalitate mareínseamná bandá <strong>de</strong> proporþionalitate micá ßi invers.1.4. 3. Element Integrator ( Lege <strong>de</strong> tip I )Relaþia intrare-ießire ín domeniul timp este datá <strong>de</strong> ecuaþia diferenþialády(t)T i = K R u(t)dtt(1.4.9)sau prin soluþia y(t) = y(t 0 ) + K R(1.4.10)T i∫ u(τ)dτ t ≥ t 0t 0Funcþia <strong>de</strong> transfer este H(s) = K R 1(1.4.11)T i sK R = factorul <strong>de</strong> proporþionalitate, T i = constanta <strong>de</strong> timp <strong>de</strong> integrare .Ráspunsul la intrare treaptá u(t) = U ⋅ 1(t − t 0 ) , reprezentat ín Fig.1.4.4. este,0y(t) = y(t 0 ) + K R(t − t 0 )U , t ≥ t 0T iu(t)Uy(t)t 0Panta:K--- Ṟ Uval( ∆ y ) =t 1 t 2T itval( U)(1.4.13)0y( )t 0t 0y( t 1 ) y( t 2 )T iK RT i* = ------val( )Figura nr.1.4.4.t7