

programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
PROGRAMUL 4 “PARTENERIATE IN DOMENIILE PRIORITARE”<br />
2007-2013<br />
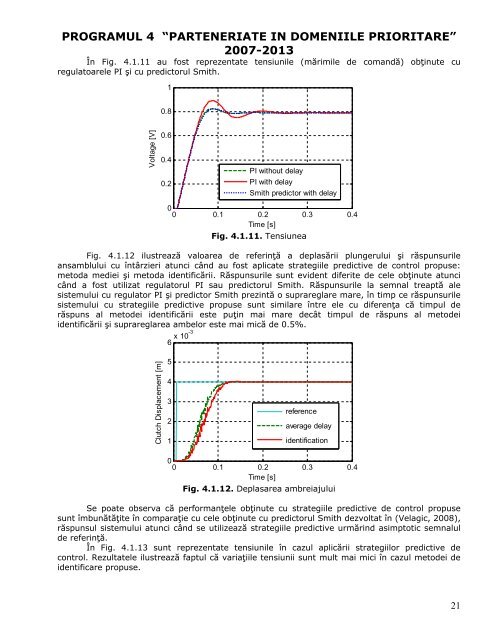
În Fig. 4.1.11 au fost reprezentate tensiunile (mărimile de comandă) obţ<strong>in</strong>ute cu<br />
regulatoarele PI şi cu predictorul Smith.<br />
Voltage [V]<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
PI without delay<br />
PI with delay<br />
Smith predictor with delay<br />
0<br />
0 0.1 0.2<br />
Time [s]<br />
0.3 0.4<br />
Fig. 4.1.11. Tensiunea<br />
Fig. 4.1.12 ilustrează valoarea de refer<strong>in</strong>ţă a deplasării plungerului şi răspunsurile<br />
ansamblului cu întârzieri atunci când au fost aplicate strategiile predictive de control propuse:<br />
metoda mediei şi metoda identificării. Răspunsurile sunt evident diferite de cele obţ<strong>in</strong>ute atunci<br />
când a fost utilizat regulatorul PI sau predictorul Smith. Răspunsurile la semnal treaptă ale<br />
sistemului cu regulator PI şi predictor Smith prez<strong>in</strong>tă o suprareglare mare, în timp ce răspunsurile<br />
sistemului cu strategiile predictive propuse sunt similare între ele cu diferenţa că timpul de<br />
răspuns al metodei identificării este puţ<strong>in</strong> mai mare decât timpul de răspuns al metodei<br />
identificării şi suprareglarea ambelor este mai mică de 0.5%.<br />
Clutch Displacement [m]<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
x 10-3<br />
reference<br />
average delay<br />
identification<br />
0<br />
0 0.1 0.2<br />
Time [s]<br />
0.3 0.4<br />
Fig. 4.1.12. Deplasarea ambreiajului<br />
Se poate observa că performanţele obţ<strong>in</strong>ute cu strategiile predictive de control propuse<br />
sunt îmbunătăţite în comparaţie cu cele obţ<strong>in</strong>ute cu predictorul Smith dezvoltat în (Velagic, 2008),<br />
răspunsul sistemului atunci când se utilizează strategiile predictive urmăr<strong>in</strong>d asimptotic semnalul<br />
de refer<strong>in</strong>ţă.<br />
În Fig. 4.1.13 sunt reprezentate tensiunile în cazul aplicării strategiilor predictive de<br />
control. Rezultatele ilustrează faptul că variaţiile tensiunii sunt mult mai mici în cazul metodei de<br />
identificare propuse.<br />
21