

programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
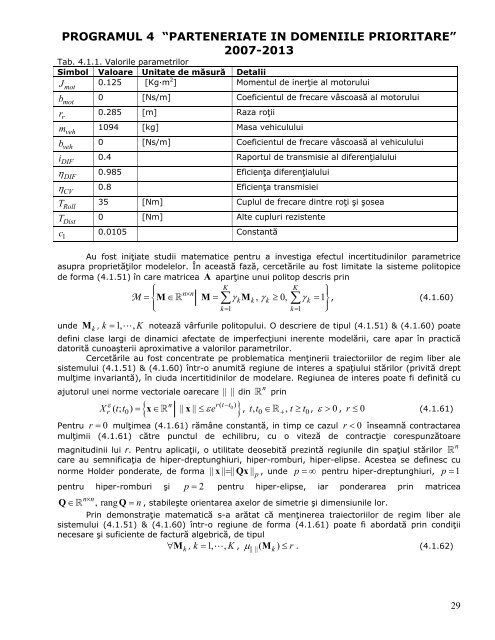
PROGRAMUL 4 “PARTENERIATE IN DOMENIILE PRIORITARE”<br />
2007-2013<br />
Tab. 4.1.1. Valorile parametrilor<br />
Simbol Valoare Unitate de măsură Detalii<br />
J 0.125 [Kg·m 2 ] Momentul de <strong>in</strong>erţie al motorului<br />
mot<br />
b mot<br />
0 [Ns/m] Coeficientul de frecare vâscoasă al motorului<br />
r 0.285 [m] Raza roţii<br />
m veh<br />
1094 [kg] Masa vehiculului<br />
b veh<br />
0 [Ns/m] Coeficientul de frecare vâscoasă al vehiculului<br />
i DIF<br />
0.4 Raportul de transmisie al diferenţialului<br />
η DIF<br />
0.985 Eficienţa diferenţialului<br />
η CV<br />
0.8 Eficienţa transmisiei<br />
T Roll<br />
35 [Nm] Cuplul de frecare d<strong>in</strong>tre roţi şi şosea<br />
T Dist<br />
0 [Nm] Alte cupluri rezistente<br />
c 1<br />
0.0105 Constantă<br />
Au fost <strong>in</strong>iţiate studii matematice pentru a <strong>in</strong>vestiga efectul <strong>in</strong>certitud<strong>in</strong>ilor parametrice<br />
asupra proprietăţilor modelelor. În această fază, cercetările au fost limitate la sisteme politopice<br />
de forma (4.1.51) în care matricea A aparţ<strong>in</strong>e unui politop descris pr<strong>in</strong><br />
⎧ K K<br />
⎪ n× n<br />
⎫⎪<br />
M = ⎨M∈ � M = ∑γkMk, γk ≥ 0, ∑γk<br />
= 1⎬,<br />
(4.1.60)<br />
⎪ k= 1 k=<br />
1 ⎪<br />
unde k 1, , K = M �<br />
⎩ ⎭<br />
k , notează vârfurile politopului. O descriere de tipul (4.1.51) & (4.1.60) poate<br />
def<strong>in</strong>i clase largi de d<strong>in</strong>amici afectate de imperfecţiuni <strong>in</strong>erente modelării, care apar în practică<br />
datorită cunoaşterii aproximative a valorilor parametrilor.<br />
Cercetările au fost concentrate pe problematica menţ<strong>in</strong>erii traiectoriilor de regim liber ale<br />
sistemului (4.1.51) & (4.1.60) într-o anumită regiune de <strong>in</strong>teres a spaţiului stărilor (privită drept<br />
mulţime <strong>in</strong>variantă), în ciuda <strong>in</strong>certitid<strong>in</strong>ilor de modelare. Regiunea de <strong>in</strong>teres poate fi def<strong>in</strong>ită cu<br />
n<br />
ajutorul unei norme vectoriale oarecare || || d<strong>in</strong> � pr<strong>in</strong><br />
ε<br />
n<br />
rt ( −t0)<br />
Xr(; t t0) = x∈� || x||<br />
≤εe<br />
, tt , 0∈� + , t≥ t0,<br />
ε > 0 , r ≤ 0<br />
(4.1.61)<br />
{ }<br />
Pentru r = 0 mulţimea (4.1.61) rămâne constantă, <strong>in</strong> timp ce cazul r < 0 înseamnă contractarea<br />
mulţimii (4.1.61) către punctul de echilibru, cu o viteză de contracţie corespunzătoare<br />
n<br />
magnitud<strong>in</strong>ii lui r. Pentru aplicaţii, o utilitate deosebită prez<strong>in</strong>tă regiunile d<strong>in</strong> spaţiul stărilor �<br />
care au semnificaţia de hiper-dreptunghiuri, hiper-romburi, hiper-elipse. Acestea se def<strong>in</strong>esc cu<br />
norme Holder ponderate, de forma || x|| = || Qx || p , unde p = ∞ pentru hiper-dreptunghiuri, p = 1<br />
pentru hiper-romburi şi p = 2 pentru hiper-elipse, iar ponderarea pr<strong>in</strong> matricea<br />
n× n<br />
Q∈ R ,rangQ=<br />
n , stabileşte orientarea axelor de simetrie şi dimensiunile lor.<br />
Pr<strong>in</strong> demonstraţie matematică s-a arătat că menţ<strong>in</strong>erea traiectoriilor de regim liber ale<br />
sistemului (4.1.51) & (4.1.60) într-o regiune de forma (4.1.61) poate fi abordată pr<strong>in</strong> condiţii<br />
necesare şi suficiente de factură algebrică, de tipul<br />
∀ M k = 1, �,<br />
K μ ( M ) ≤ r . (4.1.62)<br />
k , , || ||<br />
k<br />
29