

programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona
programul 4 “parteneriate in domeniile prioritare” - sicona

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
PROGRAMUL 4 “PARTENERIATE IN DOMENIILE PRIORITARE”<br />
2007-2013<br />
Fae<br />
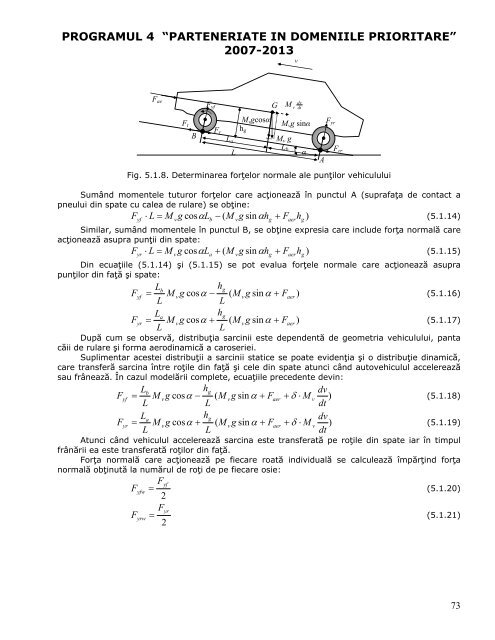
Fig. 5.1.8. Determ<strong>in</strong>area forţelor normale ale punţilor vehiculului<br />
Sumând momentele tuturor forţelor care acţionează în punctul A (suprafaţa de contact a<br />
pneului d<strong>in</strong> spate cu calea de rulare) se obţ<strong>in</strong>e:<br />
F yf ⋅ L = M vg<br />
cosα Lb<br />
− ( M vg<br />
s<strong>in</strong>αhg<br />
+ Faerhg<br />
)<br />
(5.1.14)<br />
Similar, sumând momentele în punctul B, se obţ<strong>in</strong>e expresia care <strong>in</strong>clude forţa normală care<br />
acţionează asupra punţii d<strong>in</strong> spate:<br />
F yr ⋅ L = M vg<br />
cosα La<br />
+ ( M vg<br />
s<strong>in</strong>αhg<br />
+ Faerhg<br />
)<br />
(5.1.15)<br />
D<strong>in</strong> ecuaţiile (5.1.14) şi (5.1.15) se pot evalua forţele normale care acţionează asupra<br />
punţilor d<strong>in</strong> faţă şi spate:<br />
F yf<br />
L<br />
h<br />
b<br />
g<br />
= M vg<br />
cosα − ( M vg<br />
s<strong>in</strong>α<br />
+ Faer<br />
)<br />
L<br />
L<br />
(5.1.16)<br />
La<br />
M g<br />
hg<br />
M g F<br />
F yr = v cosα + ( v s<strong>in</strong>α<br />
+ aer )<br />
(5.1.17)<br />
L<br />
L<br />
După cum se observă, distribuţia sarc<strong>in</strong>ii este dependentă de geometria vehiculului, panta<br />
căii de rulare şi forma aerod<strong>in</strong>amică a caroseriei.<br />
Suplimentar acestei distribuţii a sarc<strong>in</strong>ii statice se poate evidenţia şi o distribuţie d<strong>in</strong>amică,<br />
care transferă sarc<strong>in</strong>a între roţile d<strong>in</strong> faţă şi cele d<strong>in</strong> spate atunci când autovehiculul accelerează<br />
sau frânează. În cazul modelării complete, ecuaţiile precedente dev<strong>in</strong>:<br />
L<br />
h<br />
b<br />
g<br />
dv<br />
Fyf = M vg<br />
cosα<br />
− ( M vg<br />
s<strong>in</strong>α<br />
+ Faer<br />
+ δ ⋅ M v )<br />
(5.1.18)<br />
L<br />
L<br />
dt<br />
L<br />
h<br />
a<br />
g<br />
dv<br />
M g M g F M<br />
= v cosα<br />
+ ( v s<strong>in</strong>α<br />
+ aer + δ ⋅ )<br />
(5.1.19)<br />
L<br />
L<br />
dt<br />
Fyr v<br />
Atunci când vehiculul accelerează sarc<strong>in</strong>a este transferată pe roţile d<strong>in</strong> spate iar în timpul<br />
frânării ea este transferată roţilor d<strong>in</strong> faţă.<br />
Forţa normală care acţionează pe fiecare roată <strong>in</strong>dividuală se calculează împărţ<strong>in</strong>d forţa<br />
normală obţ<strong>in</strong>ută la numărul de roţi de pe fiecare osie:<br />
F<br />
yf<br />
Ft<br />
B<br />
Fyf<br />
Fr<br />
La<br />
Mvgcosα<br />
hg<br />
G<br />
v<br />
dv M v dt<br />
Mvg s<strong>in</strong>α<br />
Mv g<br />
Lb<br />
L α<br />
F yfw =<br />
2<br />
(5.1.20)<br />
Fyr<br />
F yrw =<br />
2<br />
(5.1.21)<br />
A<br />
Fyr<br />
Frr<br />
73