Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
24<br />
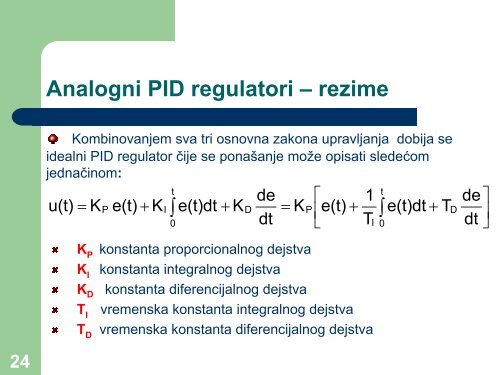
Analogni PID regulatori – rezime<br />
Kombinovanjem sva tri osnovna zakona upravljanja dobija se<br />
idealni PID regulator čije se ponašanje može opisati sledećom<br />
jednačinom:<br />
t<br />
t<br />
de ⎡ 1<br />
= KP<br />
e(t) + KI<br />
∫ e(t)dt + KD<br />
= KP<br />
⎢e(t)<br />
+ ∫ e(t)dt + T<br />
0 dt ⎣ TI<br />
0<br />
u(t) D<br />
K P konstanta proporcionalnog dejstva<br />
K I konstanta integralnog dejstva<br />
K D konstanta diferencijalnog dejstva<br />
T I vremenska konstanta integralnog dejstva<br />
T D vremenska konstanta diferencijalnog dejstva<br />
de⎤<br />
dt<br />
⎥<br />
⎦