Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
0<br />
c<br />
0<br />
v<br />
v<br />
34<br />
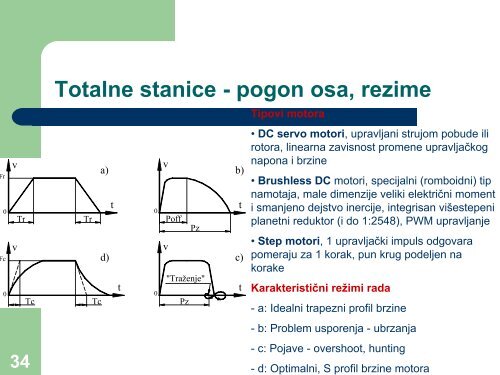
Totalne <strong>stanice</strong> - pogon osa, rezime<br />
Tr Tr<br />
Tc<br />
Tc<br />
v<br />
a) b)<br />
d)<br />
t<br />
t<br />
0<br />
0<br />
Poff<br />
v<br />
Pz<br />
Pz<br />
"Traženje"<br />
t<br />
c)<br />
t<br />
Tipovi motora<br />
• DC servo motori, upravljani strujom pobude ili<br />
rotora, linearna zavisnost promene upravljačkog<br />
napona i brzine<br />
• Brushless DC motori, specijalni (romboidni) tip<br />
namotaja, male dimenzije veliki električni moment<br />
i smanjeno dejstvo inercije, integrisan višestepeni<br />
planetni reduktor (i do 1:2548), PWM upravljanje<br />
• Step motori, 1 upravljački impuls odgovara<br />
pomeraju za 1 korak, pun krug podeljen na<br />
korake<br />
Karakteristični režimi rada<br />
- a: Idealni trapezni profil brzine<br />
- b: Problem usporenja - ubrzanja<br />
- c: Pojave - overshoot, hunting<br />
- d: Optimalni, S profil brzine motora