Grundlagen der Signalverarbeitung - Arbeitsbereich Sprache und ...
Grundlagen der Signalverarbeitung - Arbeitsbereich Sprache und ...
Grundlagen der Signalverarbeitung - Arbeitsbereich Sprache und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
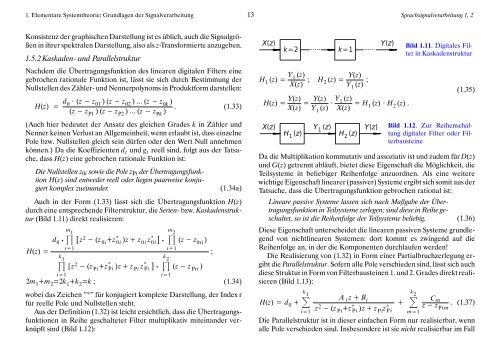
1. Elementare Systemtheorie; <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Signalverarbeitung</strong><br />
Konsistenz <strong>der</strong> graphischen Darstellung ist es üblich, auch die Signalgrößen<br />
in ihrer spektralen Darstellung, also als z-Transformierte anzugeben.<br />
1.5.2 Kaskaden- <strong>und</strong> Parallelstruktur<br />
Nachdem die Übertragungsfunktion des linearen digitalen Filters eine<br />
gebrochen rationale Funktion ist, lässt sie sich durch Bestimmung <strong>der</strong><br />
Nullstellen des Zähler- <strong>und</strong> Nennerpolynoms in Produktform darstellen:<br />
H(z) = d0 ⋅ (z − z01 )(z− z02 ) ��� (z − z0k )<br />
. (1.33)<br />
(z − zP1 )(z− zP2 ) ��� (z − zPk )<br />
(Auch hier bedeutet <strong>der</strong> Ansatz des gleichen Grades k in Zähler <strong>und</strong><br />
Nenner keinen Verlust an Allgemeinheit, wenn erlaubt ist, dass einzelne<br />
Pole bzw. Nullstellen gleich sein dürfen o<strong>der</strong> den Wert Null annehmen<br />
können.) Da die Koeffizienten di <strong>und</strong> gi reell sind, folgt aus <strong>der</strong> Tatsache,<br />
dass H(z) eine gebrochen rationale Funktion ist:<br />
Die Nullstellen z0i sowie die Pole zPi <strong>der</strong> Übertragungsfunktion<br />
H(z) sind entwe<strong>der</strong> reell o<strong>der</strong> liegen paarweise konjugiert<br />
komplex zueinan<strong>der</strong>. (1.34a)<br />
Auch in <strong>der</strong> Form (1.33) lässt sich die Übertragungsfunktion H(z)<br />
durch eine entsprechende Filterstruktur, die Serien- bzw. Kaskadenstruktur<br />
(Bild 1.11) direkt realisieren:<br />
H(z) =<br />
d . � 0 m 1<br />
[z<br />
i=1<br />
2 − (z 0 i +z * 0 i )z+ z 0 i z* 0 i] . � m 2<br />
i=1<br />
(z − z 0ri )<br />
� k 1<br />
[z<br />
i=1<br />
2 − (z Pi +z * Pi )z+ z Pi z* Pi ] . � k 2<br />
(z − z Pri )<br />
i=1<br />
2m 1 +m 2 =2k 1 +k 2 =k ; (1.34)<br />
wobei das Zeichen ”*” für konjugiert komplexe Darstellung, <strong>der</strong> Index r<br />
für reelle Pole <strong>und</strong> Nullstellen steht.<br />
Aus <strong>der</strong> Definition (1.32) ist leicht ersichtlich, dass die Übertragungsfunktionen<br />
in Reihe geschalteter Filter multiplikativ miteinan<strong>der</strong> verknüpft<br />
sind (Bild 1.12):<br />
;<br />
13 Sprachsignalverarbeitung 1, 2<br />
X(z) Y(z) Bild 1.11. Digitales Fil-<br />
k=2 k=1<br />
ter in Kaskadenstruktur<br />
H1 (z) = Y1 (z)<br />
X(z) ; H Y(z)<br />
2 (z) =<br />
Y1 (z) ;<br />
H(z) = Y(z) Y(z)<br />
=<br />
X(z) Y1 (z) ⋅ Y1 (z)<br />
X(z) = H1 (z) ⋅ H2 (z) .<br />
(1.35)<br />
X(z) Y Y(z) Bild 1.12. Zur Reihenschal-<br />
1 (z)<br />
H1 (z)<br />
H2 (z) tung digitaler Filter o<strong>der</strong> Filterbausteine<br />
Da die Multiplikation kommutativ <strong>und</strong> assoziativ ist <strong>und</strong> zudem für D(z)<br />
<strong>und</strong> G(z) getrennt abläuft, bietet diese Eigenschaft die Möglichkeit, die<br />
Teilsysteme in beliebiger Reihenfolge anzuordnen. Als eine weitere<br />
wichtige Eigenschaft linearer (passiver) Systeme ergibt sich somit aus <strong>der</strong><br />
Tatsache, dass die Übertragungsfunktion gebrochen rational ist:<br />
Lineare passive Systeme lassen sich nach Maßgabe <strong>der</strong> Übertragungsfunktion<br />
in Teilsysteme zerlegen; sind diese in Reihe geschaltet,<br />
so ist die Reihenfolge <strong>der</strong> Teilsysteme beliebig. (1.36)<br />
Diese Eigenschaft unterscheidet die linearen passiven Systeme gr<strong>und</strong>legend<br />
von nichtlinearen Systemen: dort kommt es zwingend auf die<br />
Reihenfolge an, in <strong>der</strong> die Komponenten durchlaufen werden!<br />
Die Realisierung von (1.32) in Form einer Partialbruchzerlegung ergibt<br />
die Parallelstruktur. Sofern alle Pole verschieden sind, lässt sich auch<br />
diese Struktur in Form von Filterbausteinen 1. <strong>und</strong> 2. Grades direkt realisieren<br />
(Bild 1.13):<br />
H(z) = d 0 +� k 1<br />
i=1<br />
A i z + B i<br />
z 2 − (z P i +z * P i )z+ z P i z* P i<br />
+ � k 2<br />
m=1<br />
Cm<br />
z − z Pr m . (1.37)<br />
Die Parallelstruktur ist in dieser einfachen Form nur realisierbar, wenn<br />
alle Pole verschieden sind. Insbeson<strong>der</strong>e ist sie nicht realisierbar im Fall