

KR 5 scara R350, R550 - KUKA Robotics
KR 5 scara R350, R550 - KUKA Robotics
KR 5 scara R350, R550 - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Stand: 13.07.2011 Version: Spez <strong>KR</strong> 5 <strong>scara</strong> V6 de<br />
3 Sicherheit<br />
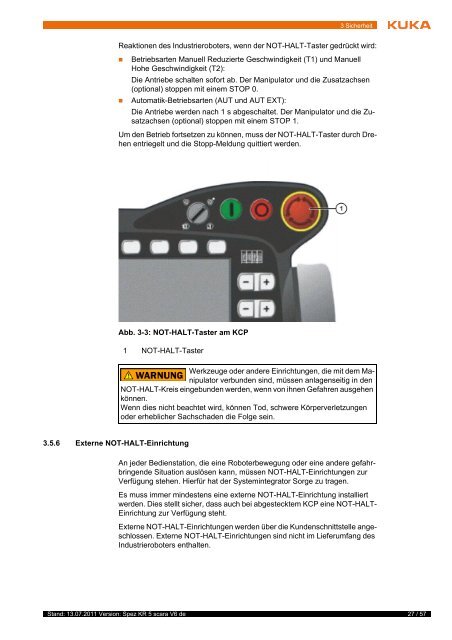
Reaktionen des Industrieroboters, wenn der NOT-HALT-Taster gedrückt wird:<br />
Betriebsarten Manuell Reduzierte Geschwindigkeit (T1) und Manuell<br />
Hohe Geschwindigkeit (T2):<br />
Die Antriebe schalten sofort ab. Der Manipulator und die Zusatzachsen<br />
(optional) stoppen mit einem STOP 0.<br />
Automatik-Betriebsarten (AUT und AUT EXT):<br />
Die Antriebe werden nach 1 s abgeschaltet. Der Manipulator und die Zusatzachsen<br />
(optional) stoppen mit einem STOP 1.<br />
Um den Betrieb fortsetzen zu können, muss der NOT-HALT-Taster durch Drehen<br />
entriegelt und die Stopp-Meldung quittiert werden.<br />
Abb. 3-3: NOT-HALT-Taster am KCP<br />
1 NOT-HALT-Taster<br />
3.5.6 Externe NOT-HALT-Einrichtung<br />
Werkzeuge oder andere Einrichtungen, die mit dem Manipulator<br />
verbunden sind, müssen anlagenseitig in den<br />
NOT-HALT-Kreis eingebunden werden, wenn von ihnen Gefahren ausgehen<br />
können.<br />
Wenn dies nicht beachtet wird, können Tod, schwere Körperverletzungen<br />
oder erheblicher Sachschaden die Folge sein.<br />
An jeder Bedienstation, die eine Roboterbewegung oder eine andere gefahrbringende<br />
Situation auslösen kann, müssen NOT-HALT-Einrichtungen zur<br />
Verfügung stehen. Hierfür hat der Systemintegrator Sorge zu tragen.<br />
Es muss immer mindestens eine externe NOT-HALT-Einrichtung installiert<br />
werden. Dies stellt sicher, dass auch bei abgestecktem KCP eine NOT-HALT-<br />
Einrichtung zur Verfügung steht.<br />
Externe NOT-HALT-Einrichtungen werden über die Kundenschnittstelle angeschlossen.<br />
Externe NOT-HALT-Einrichtungen sind nicht im Lieferumfang des<br />
Industrieroboters enthalten.<br />
27 / 57














