

SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
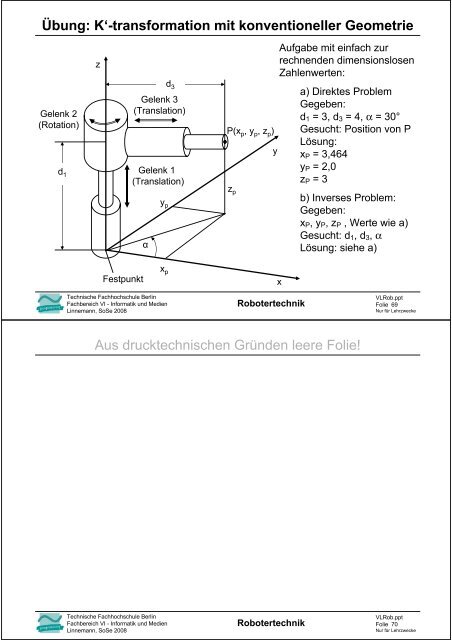
Übung: K‘-transformation mit konventioneller Geometrie<br />
z<br />
Aufgabe mit einfach zur<br />
rechnen<strong>de</strong>n dimensionslosen<br />
Zahlenwerten:<br />
Gelenk 2<br />
(Rotation)<br />
P(x p , y p , z p )<br />
y<br />
Gelenk 1<br />
(Translation)<br />
z p<br />
y p<br />
α<br />
d 3<br />
Gelenk 3<br />
(Translation)<br />
a) Direktes <strong>Problem</strong><br />
Gegeben:<br />
d 1 = 3, d 3 = 4, α = 30°<br />
Gesucht: Position von P<br />
Lösung:<br />
x P = 3,464<br />
y P = 2,0<br />
z P = 3<br />
b) <strong>Inverses</strong> <strong>Problem</strong>:<br />
Gegeben:<br />
x P , y P , z P , Werte wie a)<br />
Gesucht: d 1 , d 3 , α<br />
Lösung: siehe a)<br />
d 1<br />
x p<br />
x<br />
Festpunkt<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 69<br />
Nur für Lehrzwecke<br />
Aus drucktechnischen Grün<strong>de</strong>n leere Folie!<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 70<br />
Nur für Lehrzwecke







