

SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
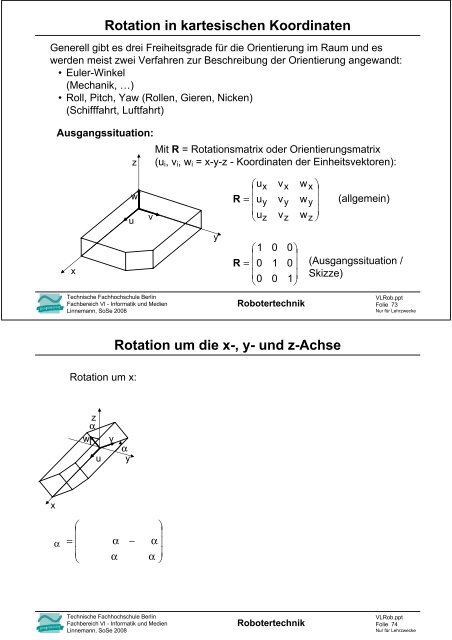
Rotation in kartesischen Koordinaten<br />
Generell gibt es drei Freiheitsgra<strong>de</strong> für die Orientierung im Raum und es<br />
wer<strong>de</strong>n meist zwei Verfahren zur Beschreibung <strong>de</strong>r Orientierung angewandt:<br />
•Euler-Winkel<br />
(Mechanik, …)<br />
• Roll, Pitch, Yaw (Rollen, Gieren, Nicken)<br />
(Schifffahrt, Luftfahrt)<br />
Ausgangssituation:<br />
z<br />
Mit R = Rotationsmatrix o<strong>de</strong>r Orientierungsmatrix<br />
(u i , v i , w i = x-y-z - Koordinaten <strong>de</strong>r Einheitsvektoren):<br />
w<br />
u<br />
v<br />
R<br />
⎛ux<br />
⎜<br />
= ⎜uy<br />
⎜<br />
⎝uz<br />
vx<br />
vy<br />
vz<br />
wx<br />
⎞<br />
⎟<br />
wy<br />
⎟<br />
w ⎟<br />
z ⎠<br />
(allgemein)<br />
x<br />
y<br />
R<br />
⎛ 1<br />
⎜<br />
= ⎜0<br />
⎜<br />
⎝0<br />
0<br />
1<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
1⎟<br />
⎠<br />
(Ausgangssituation /<br />
Skizze)<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 73<br />
Nur für Lehrzwecke<br />
Rotation um die x-, y- und z-Achse<br />
Rotation um x:<br />
z<br />
α<br />
w<br />
u<br />
v<br />
α<br />
y<br />
x<br />
z<br />
w<br />
u v<br />
γ<br />
y<br />
x<br />
R (x, α)<br />
⎛ 1<br />
⎜<br />
= ⎜0<br />
⎜<br />
⎝0<br />
0<br />
cosα<br />
sinα<br />
0 ⎞<br />
⎟<br />
− sinα⎟<br />
cosα<br />
⎟<br />
⎠<br />
R (y, β)<br />
⎛ cosβ<br />
⎜<br />
= ⎜ 0<br />
⎜<br />
⎝−<br />
sinβ<br />
0<br />
1<br />
0<br />
sinβ<br />
⎞<br />
⎟<br />
0 ⎟<br />
cosβ⎟<br />
⎠<br />
γ<br />
⎛cos<br />
γ<br />
⎜<br />
= ⎜ sin γ<br />
⎜<br />
⎝ 0<br />
− sin γ<br />
cos γ<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
1⎟<br />
⎠<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 74<br />
Nur für Lehrzwecke







