

SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
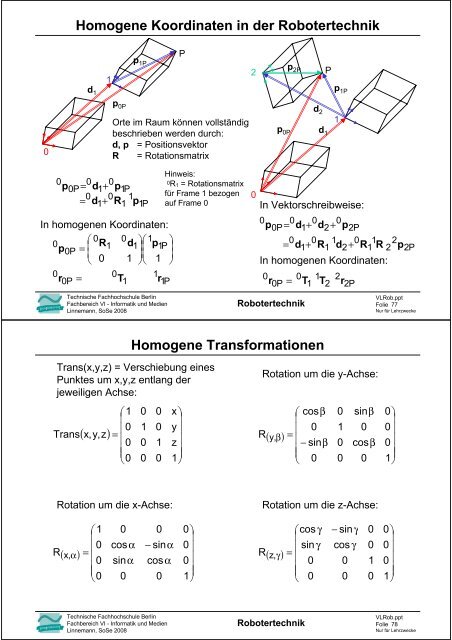
Homogene Koordinaten in <strong>de</strong>r Robotertechnik<br />
d 1<br />
1<br />
p 1P<br />
P<br />
2<br />
p 2P<br />
P<br />
p 1P<br />
0<br />
p 0P<br />
Orte im Raum können vollständig<br />
beschrieben wer<strong>de</strong>n durch:<br />
d, p = Positionsvektor<br />
R = Rotationsmatrix<br />
d 2<br />
p 0P d 1<br />
1<br />
0 0 0<br />
p0P<br />
= d1+<br />
p1P<br />
0 0 1<br />
= d1+<br />
R1<br />
p1P<br />
In homogenen Koordinaten:<br />
0 0 1<br />
0 ⎛ R1<br />
d ⎞⎛<br />
1 p ⎞<br />
p<br />
1P<br />
0P = ⎜ ⎟⎜<br />
⎟<br />
0 1<br />
1<br />
⎝ ⎠⎝<br />
⎠<br />
0<br />
0 1<br />
r0P<br />
= T1<br />
r1P<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Hinweis:<br />
0R1 = Rotationsmatrix<br />
für Frame 1 bezogen<br />
auf Frame 0<br />
0<br />
In Vektorschreibweise:<br />
0 0 0 0<br />
p0P<br />
= d1+<br />
d2+<br />
p2P<br />
0 0 1 0 1 2<br />
= d1+<br />
R1<br />
d2+<br />
R1<br />
R 2 p2P<br />
In homogenen Koordinaten:<br />
0<br />
r 0P =<br />
Robotertechnik<br />
0 1<br />
T1<br />
T2<br />
2<br />
r2P<br />
VLRob.ppt<br />
Folie 77<br />
Nur für Lehrzwecke<br />
Homogene Transformationen<br />
Trans(x,y,z) = Verschiebung eines<br />
Punktes um x,y,z entlang <strong>de</strong>r<br />
jeweiligen Achse:<br />
Rotation um die y-Achse:<br />
Trans<br />
( x,y,z)<br />
⎛ 1<br />
⎜<br />
⎜0<br />
=<br />
⎜0<br />
⎜<br />
⎝0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
x⎞<br />
⎟<br />
y⎟<br />
z⎟<br />
⎟<br />
1⎠<br />
R ,<br />
( y β)<br />
⎛ cosβ<br />
⎜<br />
⎜ 0<br />
=<br />
⎜−<br />
sinβ<br />
⎜<br />
⎝ 0<br />
0<br />
1<br />
0<br />
0<br />
sinβ<br />
0<br />
cosβ<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
0⎟<br />
⎟<br />
1⎠<br />
Rotation um die x-Achse:<br />
Rotation um die z-Achse:<br />
R ,<br />
( x α)<br />
⎛ 1<br />
⎜<br />
⎜0<br />
=<br />
⎜0<br />
⎜<br />
⎝0<br />
0<br />
cosα<br />
sinα<br />
0<br />
0<br />
− sinα<br />
cosα<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
0⎟<br />
⎟<br />
1⎠<br />
R ,<br />
( z γ)<br />
⎛cos<br />
γ<br />
⎜<br />
⎜ sin γ<br />
=<br />
⎜ 0<br />
⎜<br />
⎝ 0<br />
− sin γ<br />
cos γ<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
0⎟<br />
⎟<br />
1⎠<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 78<br />
Nur für Lehrzwecke







